

1. Introduction
La descente vers la surface (EDL=Entry, Descent and Landing) est l’une des étapes les plus difficiles d’une mission habitée vers Mars [1,2]. Pour les vaisseaux lourds, le coefficient balistique tend à être très grand. L’efficacité du freinage atmosphérique est ainsi plus faible et la vitesse reste très élevée à basse altitude, laissant très peu de temps pour un freinage propulsif complémentaire avant l’impact sur la surface. Plusieurs options permettent de résoudre ce problème. L’une d’elles consiste à utiliser un système de propulsion pour la majeure partie de la descente. Cependant, cette solution est peu pratique en raison de l’importante masse d’ergols requise. Cette option a été écartée et ne sera plus considérée ici. Trois options restent donc à évaluer et sont présentées dans cet article.
2. Les trois options
2.1 Option A : Le vaisseau cigare
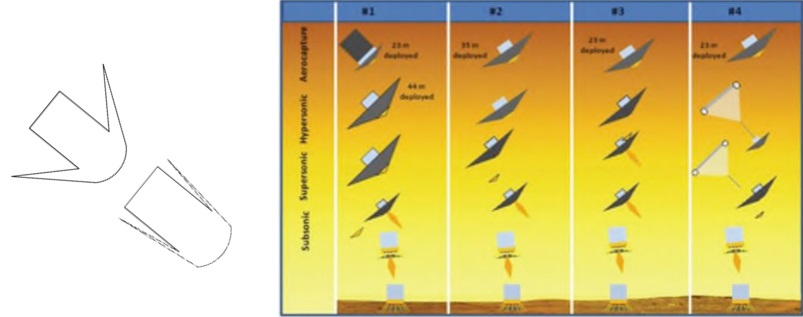
La première option consiste à augmenter la portance en utilisant la surface la plus longue d’un véhicule rigide en forme de cigare et à contrôler la descente, comme ce fut le cas pour la rentrée atmosphérique de la navette spatiale [1,2]. Cette option est également envisagée par la NASA avec le concept CobraMRV (à gauche ci-dessous) et par Space X pour l’atterrissage du Starship (à droite ci-dessous) [3].

2.2 Option B : Le bouclier gonflable
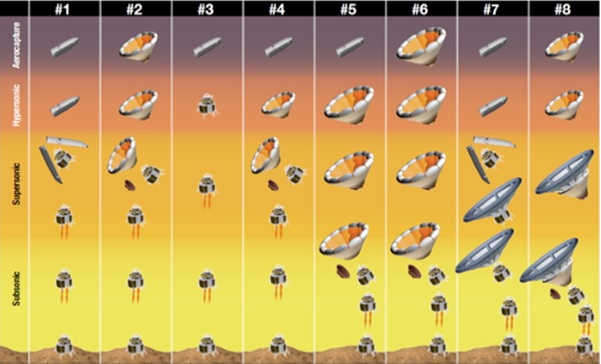
La NASA et d’autres auteurs ont exploré l’utilisation de boucliers thermiques gonflables (avec un fluide qui durcit) de très grande taille [2,8]. Un premier bouclier thermique est déployé pour le freinage en régime hypersonique, et un bouclier thermique complémentaire est déployé pour le régime supersonique (cas n°8 ci-dessous). Des tests avec de petits boucliers ont permis de valider le concept.
2.3 Option C : Le bouclier parapluie
Une troisième option est possible avec l’utilisation de boucliers thermiques rigides déployables, un peu à la manière d’un parapluie, illustrée par le concept ADEPT [4,5].
Cette option présente un inconvénient : le diamètre du bouclier thermique est contraint par le diamètre du lanceur et les capacités de stockage. Si on reprend l’analogie du parapluie, c’est comme si on était contraint par la longueur des baleines, ce qui, par voie de conséquence, limite la largeur du parapluie. Néanmoins, le problème étant étroitement lié à la masse du véhicule, il faut considérer les efforts possibles pour réduire la masse de l’atterrisseur [7]. Cette option reste donc intéressante.
3. Étude des risques
3.1 Liste des principaux risques
- Risque 1 : surchauffe du vaisseau
Cause possible : vitesse et angle d’entrée inappropriés, erreur GNC (guidage, navigation, contrôle), trajectoire inappropriée, bouclier thermique endommagé lors de la manœuvre précédente.
- Risque 2 : dislocation du vaisseau
Cause possible : trajectoire de rentrée inappropriée, défaillance de capteur, erreur GNC, erreur d’algorithme, défaillance de commande, défaillance d’actionneur.
- Risque 3 : perte du vaisseau après erreur lors de la transition supersonique
Cause possible : largage impossible du bouclier, orientation du vaisseau inappropriée empêchant l’initiation de la rétropulsion, rotation imprévue, freinage atmosphérique insuffisant et trop tardif.
- Risque 4 : perte du vaisseau lors de la rétropropulsion finale
Cause possible : surchauffe d’éléments importants du vaisseau spatial causée par les gaz expulsés, incapacité à adapter l’orientation du vaisseau spatial en temps réel, perte de poussée, quantité d’ergols insuffisante pour effectuer les corrections appropriées, défaillance des capteurs GNC.
- Risque 5 : perte du vaisseau à l’atterrissage
Cause possible : atterrissage non conforme aux exigences de précision, dommages structurels dus à un terrain accidenté, dommages structurels dus à l’interaction des gaz éjectés avec le sol, structure endommagée due à l’incapacité de réduire suffisamment les vitesses verticales et horizontales.
3.2 Variabilité des conditions de descente et d’atterrissage
Compte tenu de la liste des défaillances possibles et de leurs causes, il est important d’examiner les paramètres qui ont un impact sur les choix EDL. Le premier paramètre évident est la masse du véhicule d’atterrissage. Plus le vaisseau est lourd et le coefficient balistique élevé, moins le freinage supersonique est efficace et plus la vitesse résiduelle est élevée à basse altitude, compliquant la phase finale de la procédure d’atterrissage. De plus, à l’atterrissage, la poussée étant proportionnelle à la masse du vaisseau, plus ce dernier est lourd, plus les gaz éjectés risquent de creuser le sol.
Le deuxième paramètre important est la variabilité des manœuvres EDL. Pour la manœuvre d’aérocapture, ou pour l’entrée directe, la vitesse d’entrée atmosphérique dépend de la configuration planétaire et des efforts propulsifs déployés pour réduire la durée du voyage. La vitesse d’entrée pourrait probablement se situer entre 6 et 10 km/s, ce qui représente une large plage. Afin de qualifier les systèmes EDL, quels qu’ils soient, il sera nécessaire de tester différentes vitesses d’entrée avec de légères variations de l’angle d’entrée. De plus, les conditions environnementales peuvent également être très différentes, en fonction des variations saisonnières, de la pression à haute altitude, du vent, de la présence de poussière, etc. Les manœuvres EDL dépendent également de la masse exacte de la charge utile, qui varie selon le type de charge utile (module habitable, véhicule d’ascension martienne, etc.) et de paramètres complexes tels que la position du centre de masse (qui dépend certainement du type de charge utile), les corrections de trajectoire requises pendant la descente ou l’altitude du site d’atterrissage. Cette forte variabilité implique la mise en œuvre d’un nombre important de tests pour qualifier les systèmes. Concrètement, cela signfie qu’avant d’envoyer des humains, il faudrait procéder à un grand nombre de tests d’atterrissage sur Mars d’un vaisseau lourd en faisant varier les conditions EDL. Une telle contrainte programmatique implique un coût particulièrement élevé pour la préparation de la mission ainsi qu’un délai important (on ne peut envoyer un vaisseau vers Mars que tous les 2 ans et 2 mois) ce qui risque de compromettre l’acceptabilité de la mission. Et le moindre échec lors de ces tests conduirait à un report important de la première mission habitée.
L’enjeu étant clairement l’acceptabilité de la mission, il parait nécessaire que les agences spatiales revoient totalement leurs scénarios et commencent par choisir les options EDL qui maximisent la fiabilité, même si cela a un impact important sur les autres paramètres de la mission.
4. La meilleure option
4.1 Petits atterrisseurs
On l’a vu, la masse de l’atterrisseur est un paramètre important. Plus la masse sera réduite, plus les technologies et procédures EDL seront simples et fiables. Pour réduire la charge utile, le paramètre principal le plus facile à ajuster est le nombre d’astronautes. On peut donc préconiser la réduction de la taille de l’équipage à trois astronautes (minimum fonctionnel [7]), quitte à faire atterrir deux vaisseaux plutôt qu’un seul. Ce faisant, on augmente aussi les risques, mais du point de vue programmatique, on peut espérer réduire le nombre de tests de qualification, avec une plus grande fiabilité, et donc une plus grande acceptabilité.
4.2 Réduction de la criticité
Si les systèmes EDL tombent en panne et que le risque est la perte de l’équipage, la criticité est maximale, la probabilité de succès requise est très élevée et la conséquence directe est un nombre important de tests pour qualifier les systèmes EDL de sorte que la probabilité de succès soit de l’ordre de 99%. En revanche, s’il existe des options pour sauver l’équipage, la criticité est plus faible et la probabilité de succès requise peut être réduite. Il est intéressant de noter que, dans certaines circonstances, des options de secours existent pour sauver l’équipage [6]. En cas de problème en fin de descente, par exemple au début de la phase de rétropropulsion, l’idée est d’éjecter chaque astronaute avec un petit système de propulsion individuel et un parachute. La faisabilité et la praticabilité de cette option doivent être vérifiées, mais elle pourrait constituer une stratégie décisive pour réduire la criticité.
4.3 Bouclier parapluie ?
Examinons les risques liés à chaque option. Pour l’option A (véhicule rigide en forme de cigare), l’un des principaux avantages réside dans la protection complète du véhicule et, par conséquent, dans un risque de surchauffe moindre. Cependant, comme observé lors des essais de la navette spatiale et du Starship, la protection n’est pas simple et il existe un risque de perte de certaines tuiles de protection thermique. De plus, le volet de contrôle d’attitude est un point faible. En revanche, le volet et le contrôle d’attitude permettent d’importantes corrections de trajectoire, ce qui pourrait s’avérer crucial pour un atterrissage précis, notamment si les conditions environnementales (vent, pression à haute altitude) ont été mal estimées.
Pour les options B et C (boucliers thermiques gonflables et boucliers thermiques rigides déployables), l’avantage réside dans la simplicité du concept et la masse plus faible par rapport à l’option A. Une difficulté potentielle pourrait être la suppression des boucliers thermiques avant la transition vers la rétropropulsion.
Pour l’option C, le rangement et le déploiement du bouclier déployable auraient pu constituer une difficulté majeure. Cependant, si on suit la préconisation de réduire la masse du véhicule d’atterrissage au minimum, la taille du bouclier serait limitée. Un diamètre plus petit réduit les contraintes de rangement, les contraintes mécaniques et facilite le contrôle des systèmes. Un autre avantage des options B et C est la possibilité de contrôler l’attitude et l’angle d’attaque à l’aide de cardans, un système peu sophistiqué. De plus, si le centre de masse est correctement situé, une entrée et une descente sans contrôle d’attitude n’entraîneraient pas la désintégration du vaisseau spatial. La descente suivrait une trajectoire balistique ; il pourrait devenir impossible d’atterrir à proximité du site d’atterrissage prévu, mais si la phase propulsive est opérationnelle, ou si les systèmes de sauvetage sont déclenchés dans des conditions acceptables, les astronautes seraient en sécurité.
L’avantage de l’option C (le parapluie) est sa simplicité et son adaptabilité, ce qui représentent des avantages non négligeables pour la qualification. C’est celle que nous préférons à ce stade, mais il convient de réaliser une étude approfondie avant de valider ce choix.
5. Conclusion
Il y a plusieurs points importants à retenir :
- En raison des risques et de la variabilité des conditions de descente et d’atterrissage, il sera nécessaire de procéder à de nombreux tests dans l’atmosphère martienne, ce qui pourrait être long et coûter extrêmement cher, au point de représenter une menace pour l’acceptabilité de la mission.
- La masse de l’atterrisseur est un paramètre important du problème. La réduction de l’équipage à 3 astronautes pourrait être un choix décisif permettant de faciliter la qualification des systèmes EDL et de réduire la menace de non acceptabilité.
- Trois grandes options existent pour les systèmes EDL. Notre préférence va à la troisième, le bouclier rigide déployable – comme un parapluie -, mais il convient d’approfondir les études et l’évaluation de ces options avant de trancher.
- Enfin, la criticité de l’atterrissage peut être réduite en intégrant des sièges éjectables munis d’un microsystème de propulsion et d’un parachute.
Références
[1] Ciancolo A.D. and Polsgrove T.T., Human Mars Entry, Descent, and Landing Architecture. Study Overview. Proceedings of the AIAA SPACE conference, 13 – 16 September 2016, Long Beach, California, USA.
[2] Drake B.G., and Watts K.D., (eds.) Human Exploration of Mars Design Reference Architecture 5.0, Addendum #2, NASA/SP-2009-566-ADD2, NASA Johnson Space Center, Houston, TX, March 2014.
[3] Polsgrove T.P. et al, Human Mars Entry, Descent and Landing Architecture Study: Rigid Decelerators, proceedings of the AIAA Space Conference, 17-19 September 2018, Orlando, FL, USA.
[4] Polsgrove T.P., Percy T.K., Sutherlin S., Dwyer-Cianciolo A.M., Dillman R., Brune A., Cassell A. and Johnston C., Human Mars Entry, Descent and Landing Architecture Study: Deployable Decelerators, proceedings of the AIAA Space Conference, 17-19 September 2018, Orlando, FL, USA.
[5] Saikia S.J., Saranathan H., Grant M.J., Longuski J.M., Trajectory Optimization for Adaptive Deployable Entry and Placement Technology (ADEPT), proceedings of AIAA/AAS Conference, San Diego, Californie, USA, 4-7 August 2014.
[6] Salotti, J.M. and Doche, J., Preliminary study of rescue systems for Mars landing, Acta Astronautica, Volume 188, Pages 81-88, November 2021.
[7] Salotti, J.M., Heidmann, R. and Suhir, E., Crew size impact on the design, risks and cost of a human mission to Mars, proceedings of the IEEE Aerospace Conference, March 2014, Big Sky (MO), USA.0
[8] Steinfeldt, B.A., Theisinger, J.E., Korzun, A.M., Clark, J.G., Grant, M.J., and Braun, R.D., High Mass Mars Entry, Descent, and Landing Architecture Assessment, proceedings of the AIAA SPACE 2009 Conference & Exposition, 14 – 17 September 2009, Pasadena, California.