par Camille Gontier
Sol 5. Aujourd’hui Arthur a utilisé l’équipement « modeste » de l’observatoire Musk pour observer un buisson à 10 m du Hab; Mehdi a grommelé toute la journée sur le fait que son pain cuit maison n’était pas assez salé; Mohammad et Louis ont presque perdu le drone NorCal dans le désert et ont décidé de l’appeler Pikachu; et Jérémy a découvert l’application « Photo Booth » dans l’iPad prêté par le Cadmos, ce qui a conduit à une forte augmentation de sa productivité.
Demain un reporter de Phobos TV va passer toute la journée avec nous pour documenter notre mission sur un réseau national. Aussi compte tenu des événements pathétiques du jour, je pense que ce serait une bonne idée de montrer la bonne santé mentale de l’équipage et le sérieux de nos procédures scientifiques en vous faisant un bilan de la manière dont se sont déroulées nos expériences jusqu’à présent:
– Le drone NorCal a été sorti de sa boite hier et semble maintenant totalement fonctionnel. Il a été sorti du Hab dans l’après midi par le sas technique: l’objectif principal était de le contrôler depuis le Hab et de le conduire par le tunnel jusqu’à l’observatoire Musk. La mission a été accomplie, illustrant la portée des émetteurs et la capacité des batteries. Le retour a été un peu erratique car nous avons perdu le contact vidéo: nous avons du l’observer depuis la fenêtre du coin cuisine.
– Le bon vieux VRP (Véhicule de Reconnaissance de Paroi) prêté par l’association Planète Mars fonctionne toujours correctement et délivre avec bonheur sa charge utile au pied des plus hautes falaises. Pendant le déjeuner nous avons regardé un vieux documentaire diffusé sur la télévision en France il y a plusieurs années et avons découvert avec une heureuse surprise que le VRP faisait déjà partie de cette mission.
– Après le déjeuner, Jérémy reste toujours dans la cuisine, lisant religieusement les emballages de nourriture et regardant des choses sur son iPad. Il n’est pas intéressé par le café d’après déjeuner, mais décrit tout ce qu’il a mangé dans le logiciel prêté par le Cadmos. Son analyse de la nourriture sera utilisée par l’agence spatiale française pour préparer la mission de Thomas Pesquet dans la station orbitale ISS en novembre prochain.
A suivre demain !

Mohammad Iranmanesh se prépare pour la sortie EVA du matin (doc. MDRS 164)

Jérémy Rabineau également (doc. MDRS 164)

et Camille Gontier (doc. MDRS 164)

Cinq minutes de décompression (fictive) dans le sas avant la sortie (doc. MDRS 164)

La quatrième sortie EVA de la mission. L’expérience « évaluation des moments d’inattention en sortie extra véhiculaires EVA » (mind wandering) a été conduite pendant cette sortie. (Doc. MDRS 164)
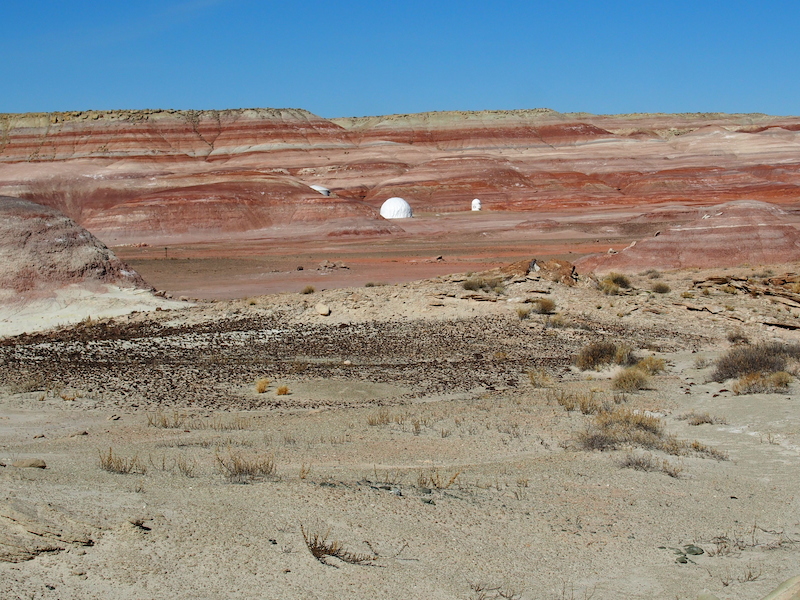
Vue sur le Hab Ridge avec le Hab partiellement caché, le dôme de la serre et l’observatoire Musk (doc. MDRS 164)

Au travail pendant l’EVA 4. Le VRP est encore de sortie pour son 120 ème essai. Comme charge utile lors de cette EVA, il emportait la nouvelle caméra vidéo sans fil et le répéteur radio. (Doc. MDRS164)

Dans l’après midi l’équipe procède à l’entretien des casques des scaphandres de simulation avec mise en place de nouvelles visières afin d’améliorer la visibilité en EVA et la qualité des images prises par les lunettes connectées. (Doc. MDRS 164)
Les autres rapports du jour, en anglais, sont disponibles ci dessous:
L’équipage et les expériences prévues lors de la mission sont présentés ici.

(Doc. MDRS 164)