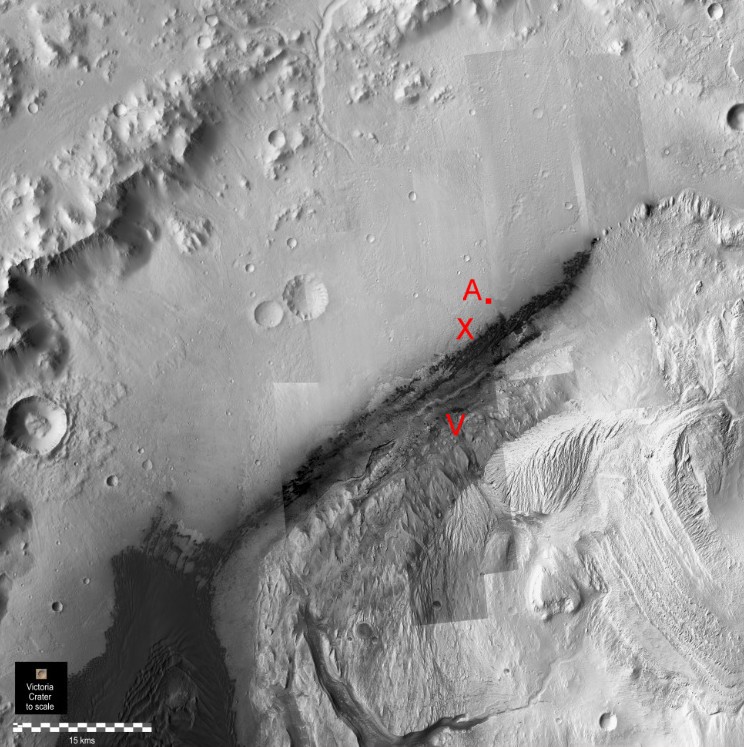
Curiosity (position désignée par X) a parcouru du chemin depuis son point d’atterrissage (A) mais est encore loin de sa destination privilégiée, la vallée qui descend du Mont Sharp (V). (Doc. NASA/JPL-Caltech/Univ. of Arizona)
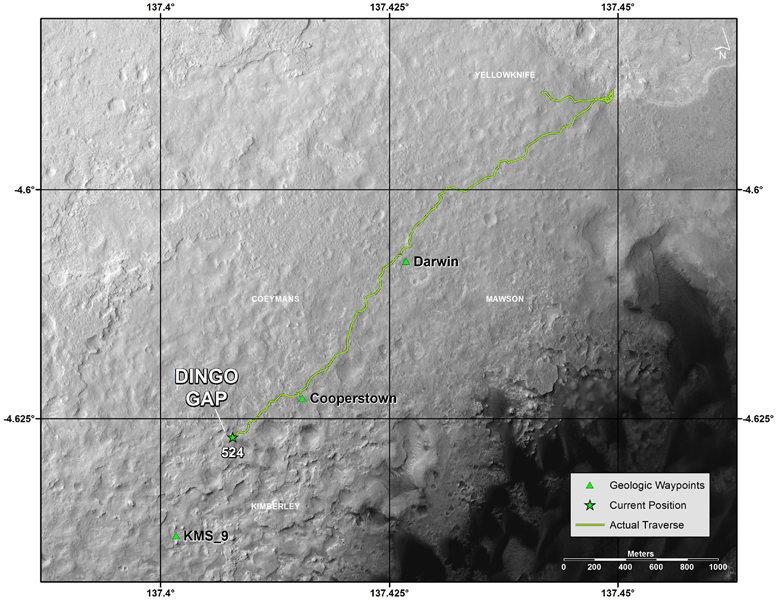
Zoom sur les derniers déplacements du rover; Sur cette carte photographique est indiquée la position du rover au 524 ème jour martien de sa mission, le 26 janvier 2014. Il approche d’un passage entre deux monticules qui a été désigné Dingo Gap. Faut il passer dans ce petit col occupé par une dune ou le contourner, telle est la question que se posent les responsables JPL du pilotage du rover. (Doc NASA/JPL-Caltech)
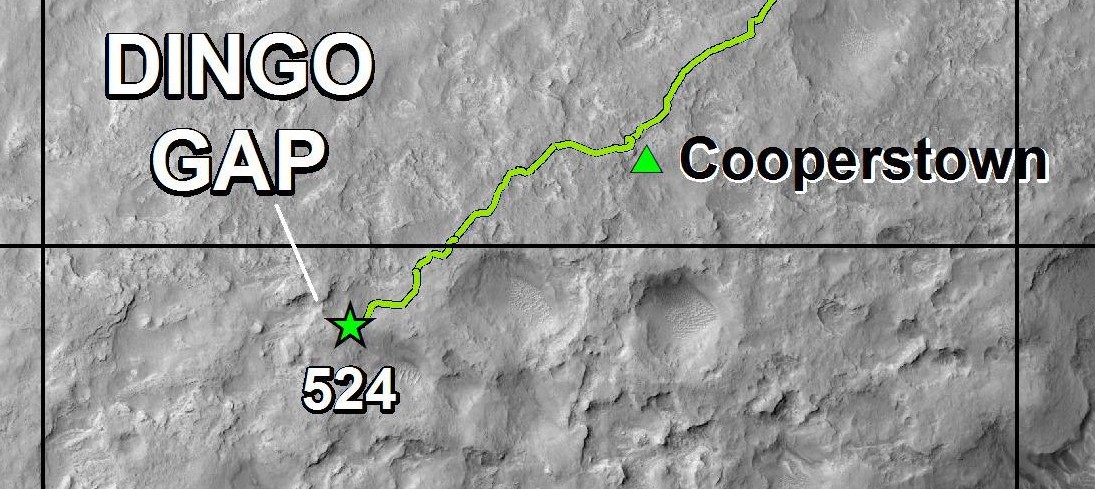
Position de Curiosity au 524 ème jour de sa mission, le 26 janvier, à proximité de Dingo Gap (doc NASA/JPL-Caltech)
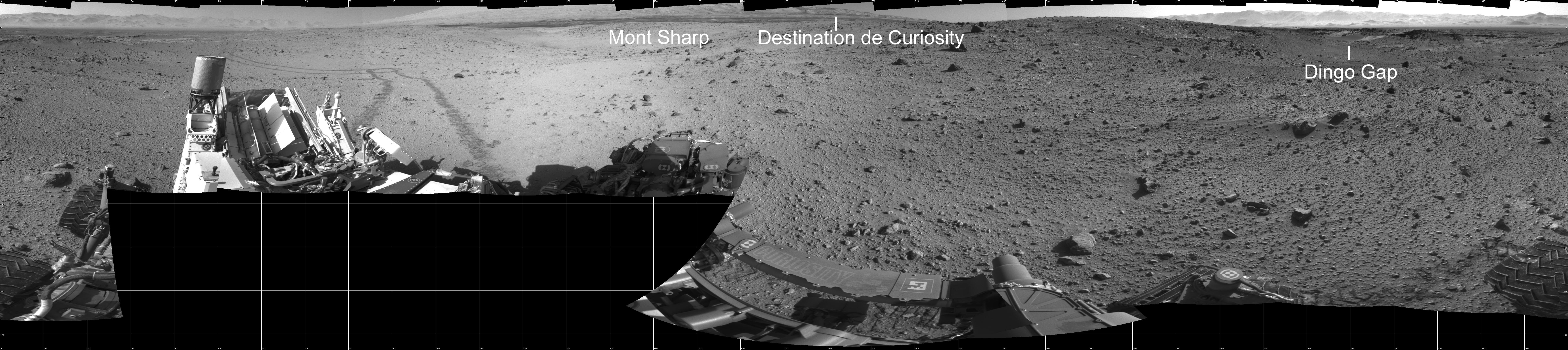
Un panorama à 360 ° pris le 26 janvier (doc. NASA/JPL-Caltech)
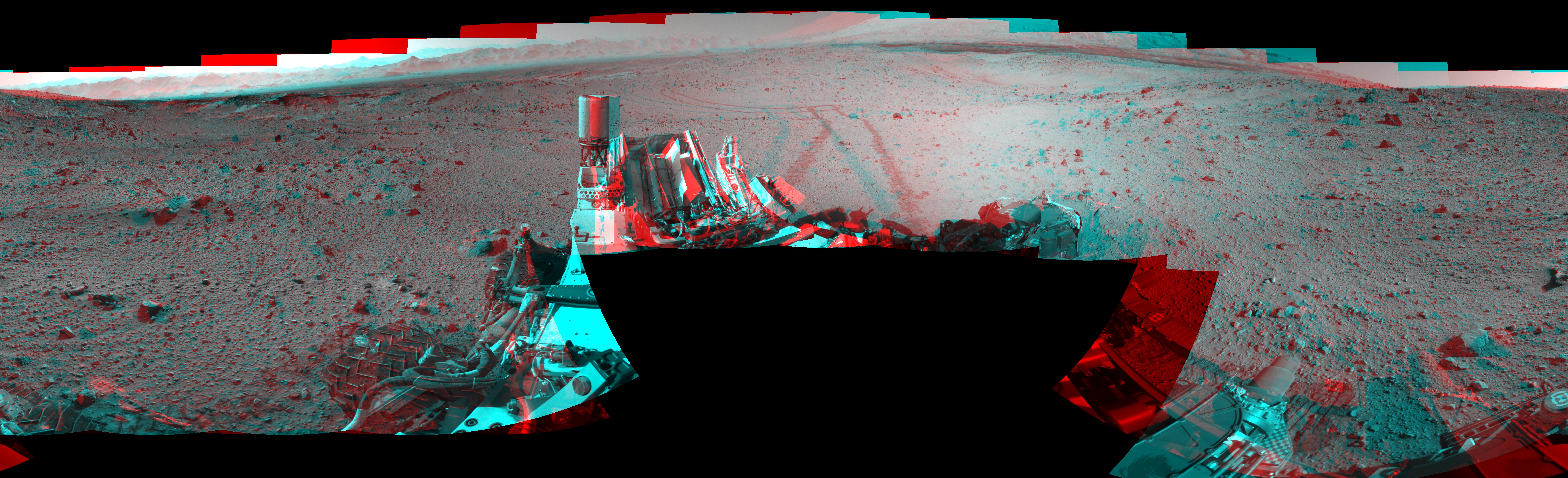
Le même panorama en 3D (doc. NASA/JPL-Caltech)

Une vue de Dingo Gap prise le 28 janvier (526 ème jour martien de la mission) par la Mast Cam gauche (doc. NASA/JPL-Caltech/MSSS)
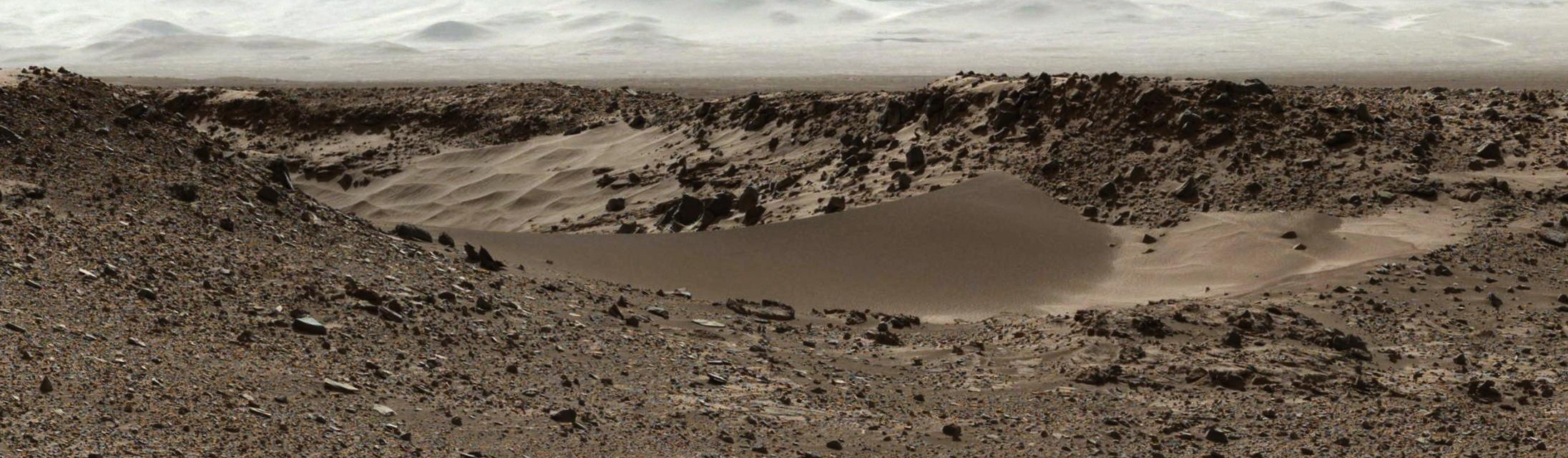
Zoom sur Dingo Gap (doc. NASA/JPL-Caltech/MSSS)

Un peu à droite de Dingo Gap dans les images précédentes, les hasards de la perspective montrent au loin, dans le rempart du cratère Gale, la vallée Peace dont les alluvions se sont étendus jusqu’à la zone d’atterrissage de Curiosity. La vallée Peace est parfaitement visible dans le haut de la 1ère image de cet article. On voit bien que Curiosity est actuellement à peu près dans l’axe de la partie terminale de cette vallée. (Doc. NASA/JPL-Caltech/MSSS)
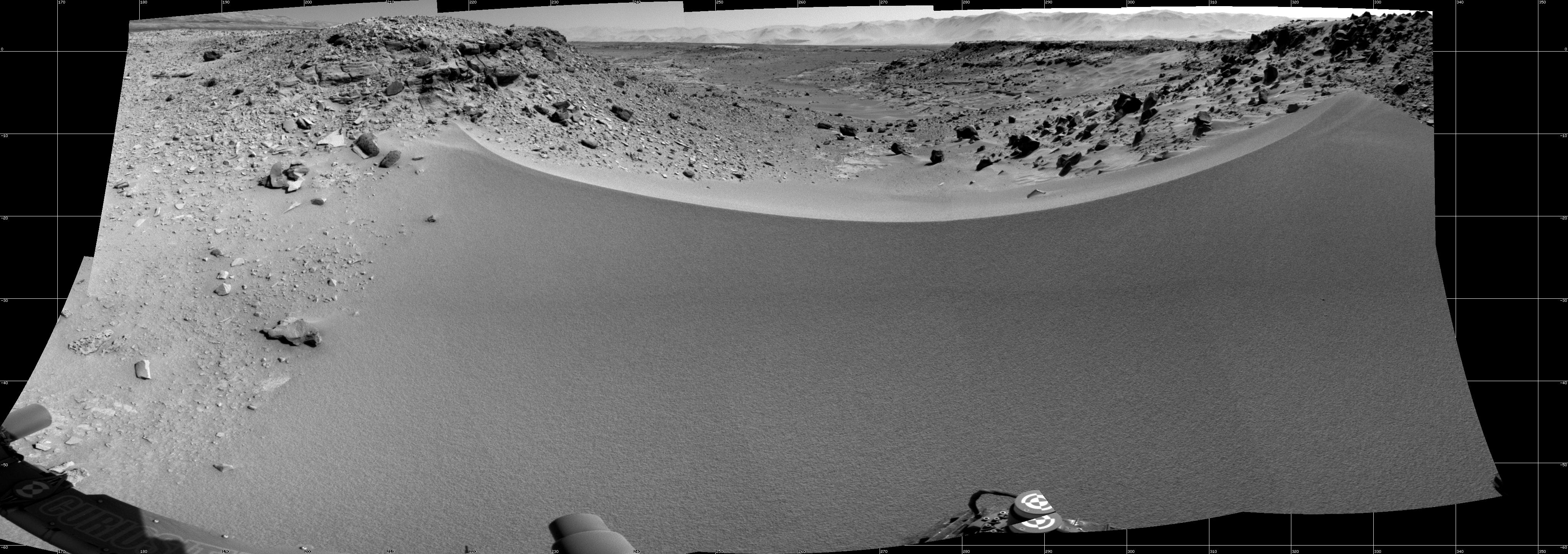
30 janvier: Curiosity s’est rapproché de Dingo Gap et de la dune qui en barre le passage. La dune mesure environ 1 m de haut. Les pilotes de Curiosity se posent la question de traverser la dune et d’évoluer ainsi sur un terrain plus favorable pour l’usure des roues que les zones rocheuses situées à gauche et à droite. L’érosion des roues du rover semble s’être accrue dans le dernier trimestre de 2013, depuis que le véhicule a repris sa route vers le pied du Mont Sharp et évolue sur des terrains rugueux. (Doc. NASA/JPL-Caltech)
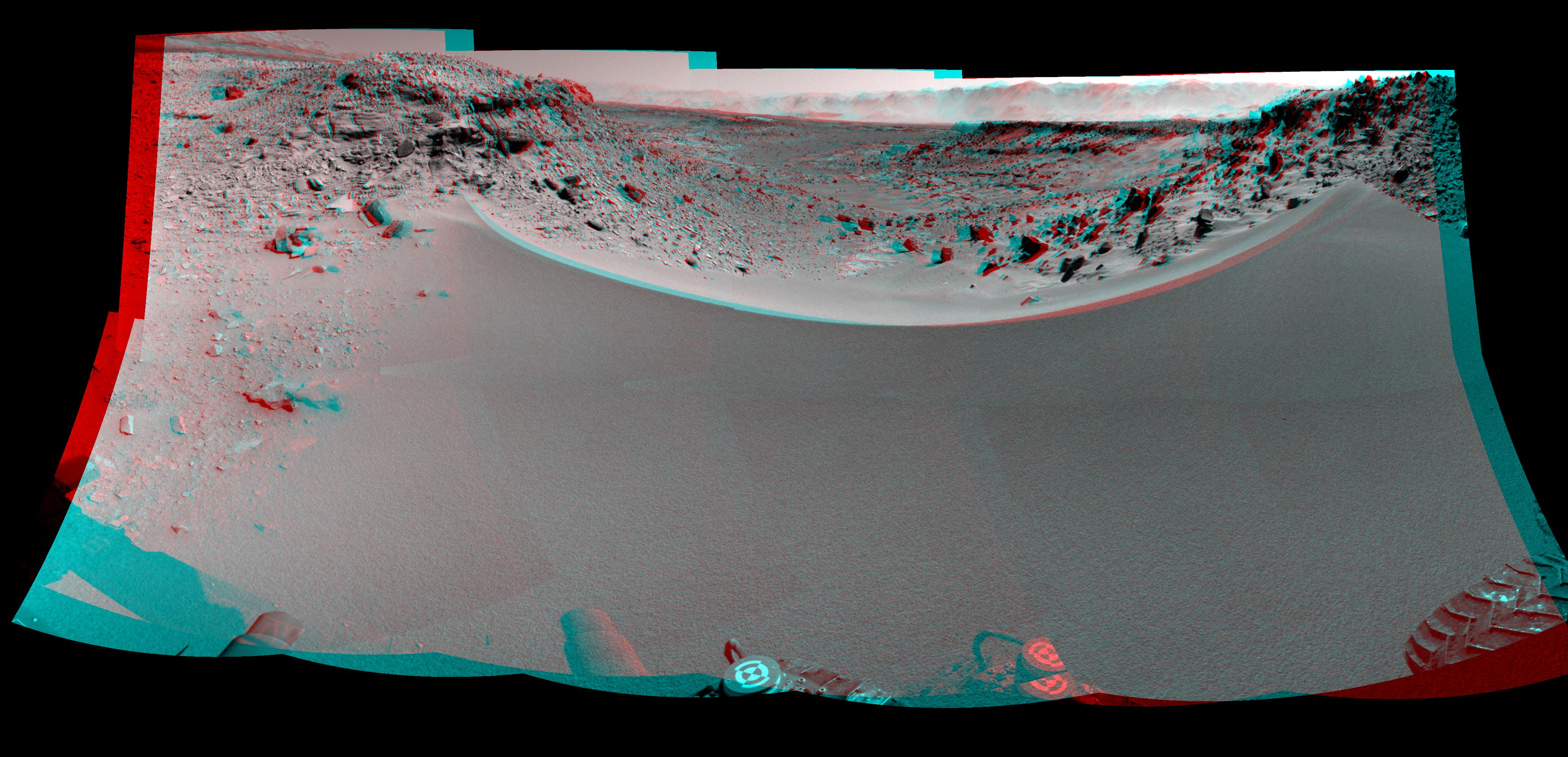
La même image en 3D (doc. NASA/JPL-Caltech)

Quelque temps auparavant, le 15 janvier, Curiosity est passé à proximité de cette roche désignée Harrison. Cette image résulte de la combinaison des vues de deux caméras: la RMI de l’expérience Chemcam et la Mastcam droite. La roche présente des cristaux clairs d’environ 1 cm de long noyés dans une matrice plus foncée. Les tirs lasers et l’analyse Chemcam ont montré que les cristaux sont du type feldspath alors que la matrice comporte majoritairement du pyroxène. Cette roche est du type basaltique (roche ignée). (Doc. NASA/JPL-Caltech/LANL/CNES/IRAP/LPGNantes/CNRS/IAS/MSSS)

Vue de détail par la caméra RMI de la Chemcam (doc. NASA/JPL-Caltech/LANL/CNES/IRAP/LPGNantes/CNRS/IAS/MSSS)
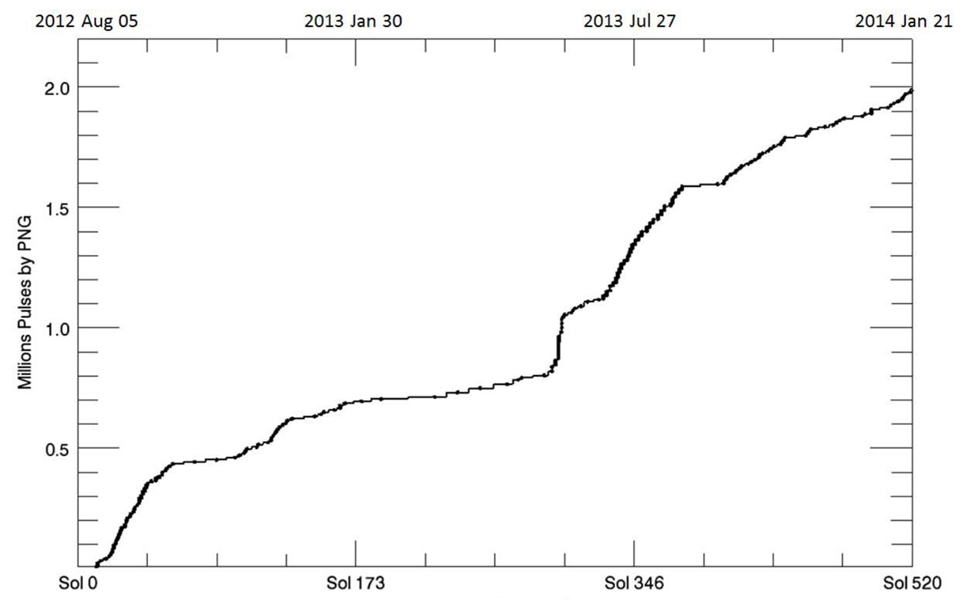
L’exploration robotique de Mars est déjà fortement internationale. Le crédit des images précédentes illustre la participation française aux expérience du rover. Le graphique ci-dessus indique, au fur et à mesure du déroulement de la mission, le nombre de « tirs » de faisceaux de neutrons effectués dans le sol par l’instrument russe DAN dont l’objectif est de mesurer la teneur en eau du sol. DAN en est maintenant à 2 millions de tirs. Cela correspond au 1/5 ème de l’autonomie du dispositif. La mesure a indiqué un taux assez constant de 1,5% d’eau près de la surface et environ deux fois plus à 60 cm de profondeur.(Doc. NASA/JPL-Caltech/Russian Space Research Institute)