Curiosity a reçu une modification de logiciel qui lui permet maintenant de choisir seul les cibles pour des analyses ChemCam. Rappelons que la ChemCam permet d’analyser à distance et jusqu’à 7 m les roches en procédant à un tir laser qui vaporise une petite partie de la surface ce qui permet, par spectroscopie, de trouver la composition. ChemCam (https://msl-curiosity.cnes.fr/fr/MSL/Fr/GP_chemcam.htm) est l’une des contributions françaises aux instruments scientifiques de Curiosity.
Pour cette autonomie de décision Curiosity utilise le logiciel AEGIS (Autonomous Exploration for Gathering Increased Science) dont une version avait déjà été implantée sur Opportunity en 2011. Muni de ce logiciel le petit rover pouvait choisir vers quelle cible orienter sa caméra à haute définition Pancam à partir de l’analyse d’une image prise avec une caméra grand champ sans intervention de la Terre.
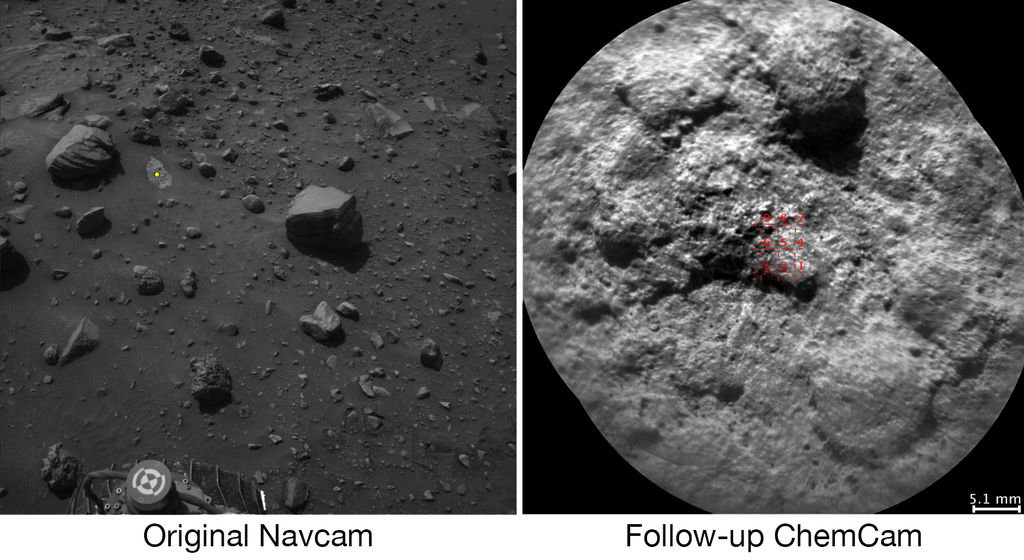
A gauche l’image Navcam que le logiciel peut analyser pour définir une cible à la ChemCam (à droite) (doc. NASA/JPL-Caltech/LANL/CNES/IRAP/LPGNantes/CNRS/IAS)
Le logiciel Aegis peut aussi, en partant directement d’une image ChemCam comme celle de droite ci-dessus, pointer le laser vers une cible intéressante (veine minérale par exemple) désignée par les scientifiques au sol.

Panorama d’images Mastcam vers le Nord du 16 juillet 2016 , montrant le rempart du cratère Gale dans le fond (doc. NASA/JPL-Caltech/MSSS/montage APM)

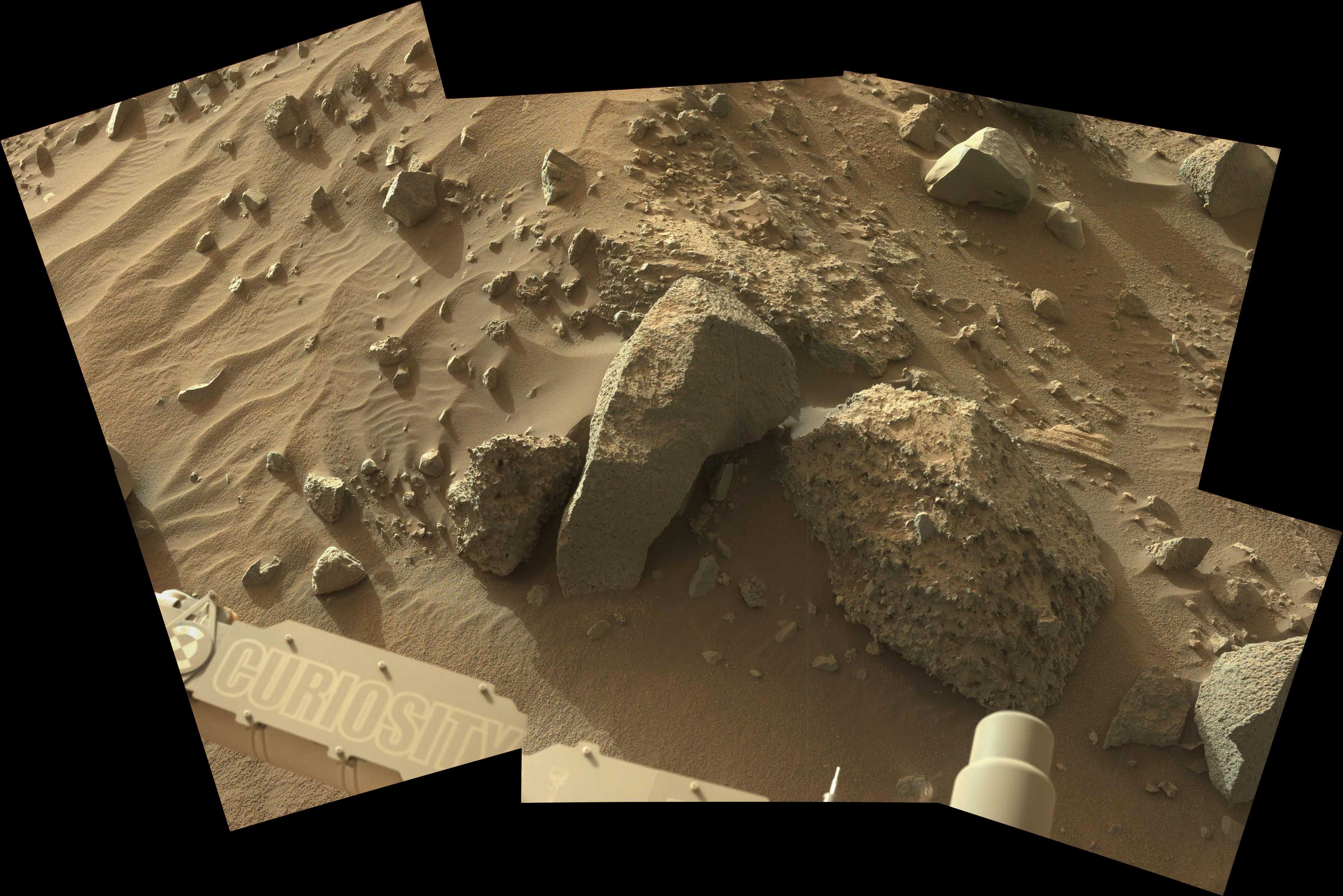
Montage d’images Mastcam du 19 juillet (doc. NASA/JPL-Caltech/MSSS/montage APM)
Montage d’images Mastcam du 19 juillet montrant le sol tout près du rover (doc. NASA/JPL-Caltech/MSSS/montage APM)
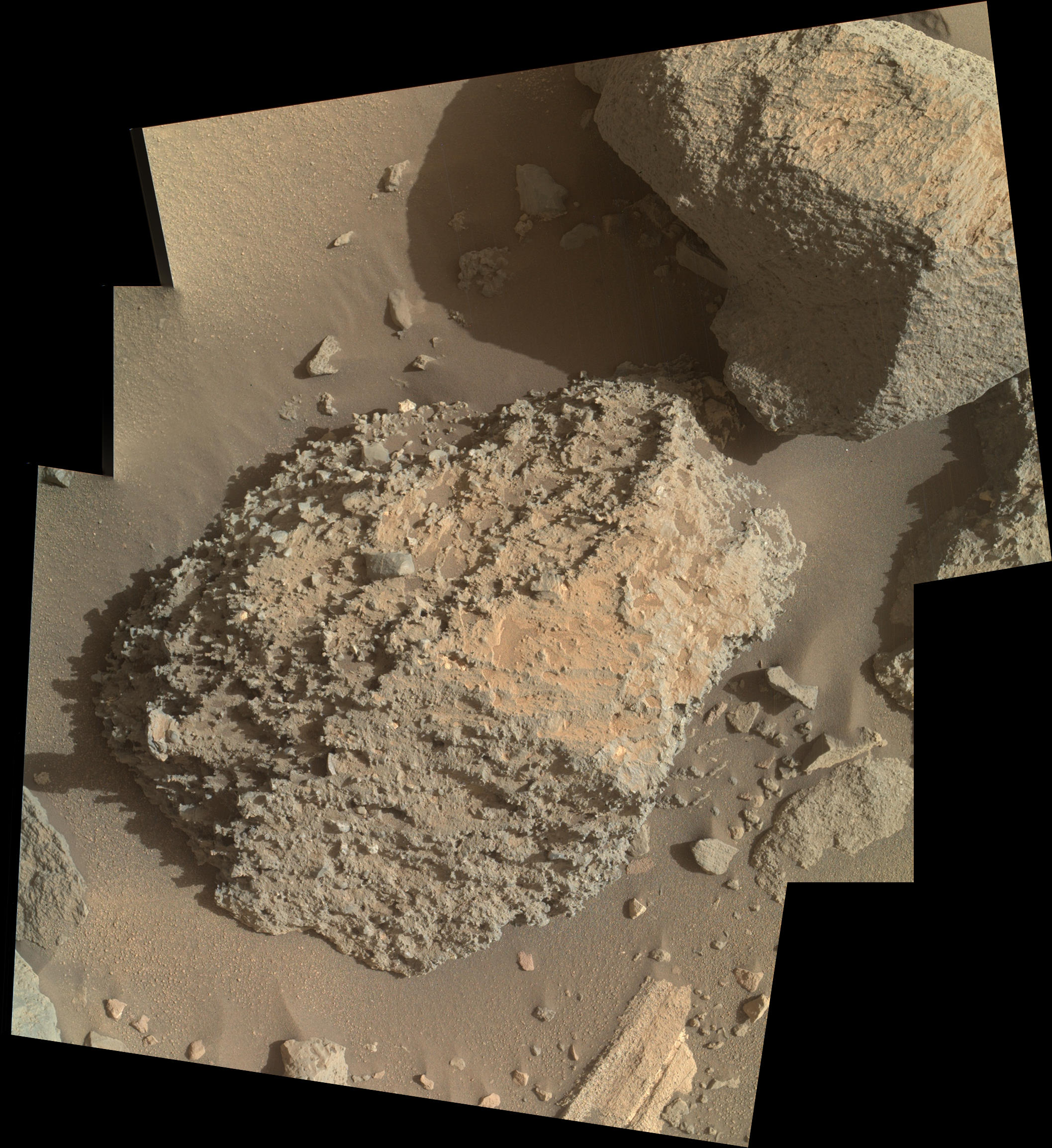
Montage d’image de la caméra MAHLI du 21 juillet montrant l’intéressant rocher détritique constitué d’un conglomérat de cailloux plus petits, déjà visible sur l’image précédente (doc. NASA/JPL-Caltech/MSSS/montage APM)
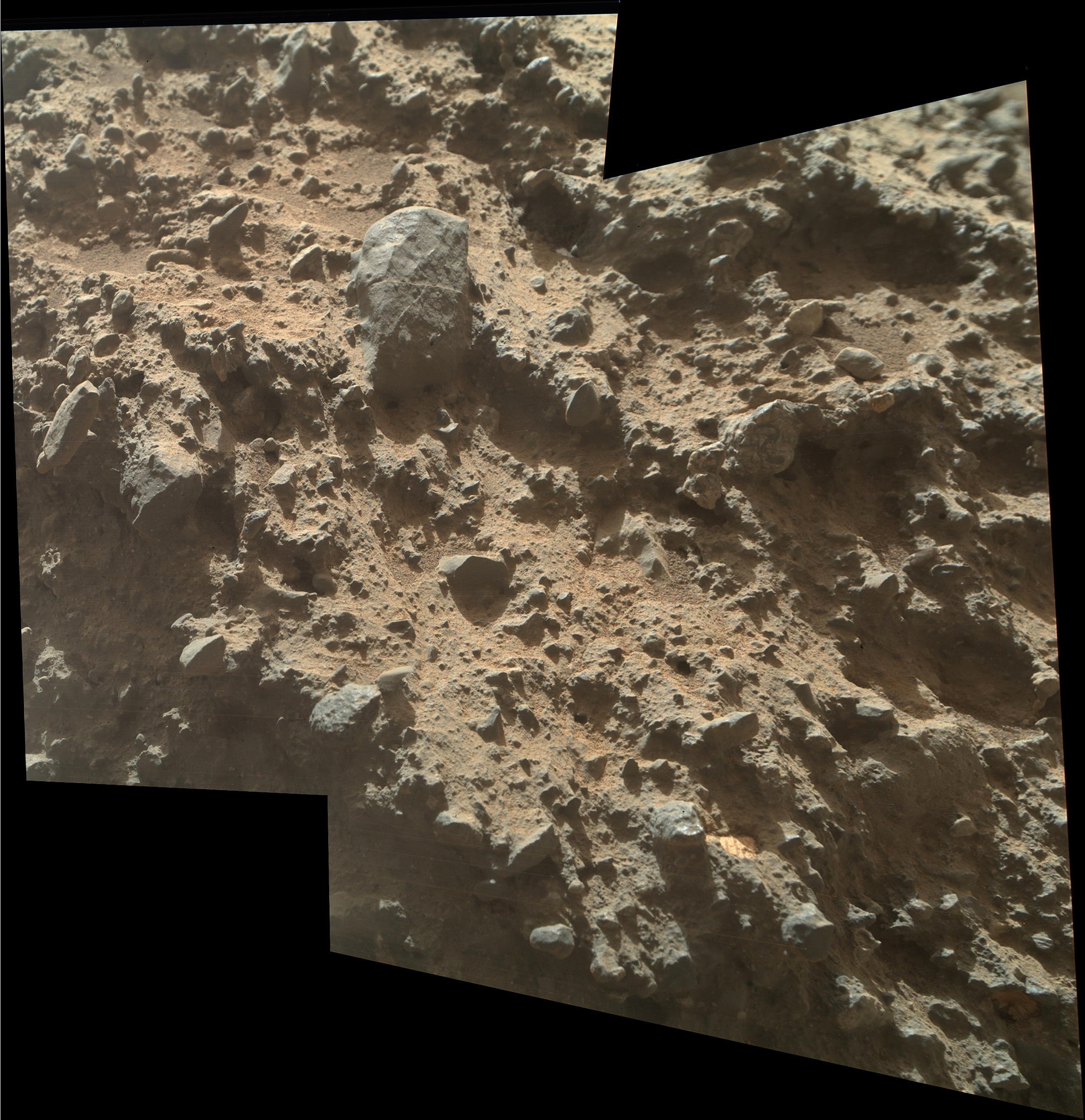
Zoom de la caméra MAHLI sur ce roc le même jour. On note que les petits cailloux agglomérés dans cette roche présentent quelques adoucissements d’angles dus à une érosion passée mais pas autant que le poudingue, roche détritique également, trouvé par Curiosity peu après son atterrissage en 2012. (Doc. NASA/JPL-Caltech/MSSS/montage APM)

Le poudingue martien trouvé par Curiosity en 2012 (doc. NASA/JPL-Caltech/MSSS)

Ce 21 juillet également la caméra MAHLI jette un coup d’oeil à l’une des roues qui est en butée sur un caillou anguleux qui pourrait la détériorer. Remarquer l’enfoncement généralisé du voile métallique entre les nervures en zigzag. (Doc. NASA/JPL-Caltech/MSSS)