Introduction
Deux sondes Viking ont atterri sur la planète rouge en 1976. De nombreux robots ont ensuite été envoyés avec succès à la surface de Mars, par exemple Sojourner, Spirit, Opportunity, Curiosity, pour n'en citer que quelques-uns. De premier abord, donc, il semble qu'il y ait déjà un savoir-faire en la matière et que la phase d'entrée, descente et atterrissage sur Mars d'un vaisseau spatial ne présente pas de difficultés majeures. Pourtant, de nombreux spécialistes prétendent au contraire qu'il y a de nombreux challenges à relever et que cette phase est périlleuse. Qu'en est-il exactement ? Pour répondre à cette question, nous revenons section 1 sur l'expérience acquise avec les petits atterrisseurs et sur les différentes étapes de la descente. Afin de comprendre les difficultés et les challenges, nous introduisons section 2 le concept de "coefficient balistique", sans rentrer dans les détails trop techniques. Nous nous appuyons pour cela sur un article souvent cité en référence, celui de Braun et Manning, publié dans la revue Journal of Spacecraft and Rockets en 2007 (Braun 2007). Cela nous permettra de comprendre les différentes options qui s'offrent aux ingénieurs pour réussir la descente vers la surface martienne et qui sont présentées section 3.
1. Expérience des petits atterrisseurs
Pour atterrir sur une planète, il faut contrer la force gravitationnelle qui tend à faire accélérer le vaisseau vers la surface. La première solution évidente est de freiner grâce à un système de propulsion tel que celui qui a été utilisé pour atterrir sur la Lune. Toutefois, plus la planète a une gravité importante, plus la quantité d'ergols nécessaire au freinage est grande. Dans le cas de Mars, une telle manœuvre demanderait une quantité phénoménale d'ergols. Pour 1 tonne de charge utile, il faudrait en effet de l'ordre de 50 tonnes de carburant. Mais Mars possède une atmosphère. Dans ce cas, il est possible d'exploiter celle-ci pour aider au freinage et réduire la quantité d'ergols nécessaire au strict minimum. Idéalement, comme cela a été fait pour les petits atterrisseurs, un bouclier thermique enveloppe le vaisseau et la procédure de freinage et d'atterrissage sur Mars se déroule de la façon suivante, en considérant que le vaisseau est déjà positionné en orbite martienne :
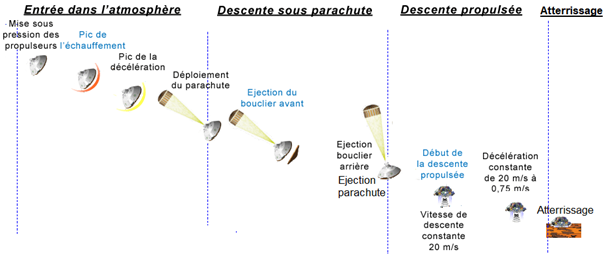
- Freinage principal : Petite phase propulsive pour sortir de l'orbite martienne et faire entrer le vaisseau dans l'atmosphère martienne. Freinage grâce aux frottements dans l'atmosphère martienne. La vitesse est réduite de 6 km/s à 500 m/s environ. Le bouclier thermique permet au vaisseau de ne pas se consumer lors de cette phase.
- Freinage sous parachute : Largage du bouclier thermique à 20 km d'altitude et ouverture du parachute. Le freinage se poursuit. La vitesse est réduite à 200 m/s.
- Descente propulsée. Le freinage sous parachute ayant atteint ses limites, le parachute est largué et les moteurs sont allumés pour la phase propulsive terminale. La vitesse n'est plus que de 20 m/s à une centaine de mètres du sol.
- Atterrissage : Les pieds sont sortis. La vitesse est progressivement réduite. Elle est inférieure à 1 m/s lorsque le vaisseau touche le sol.
Peut-on procéder de la même manière avec de gros vaisseaux ? Voici ce que dit Robert Braun à ce sujet (traduit de l'Anglais) :
<< En raison de l'augmentation spectaculaire de la masse au sol requise pour les missions d'exploration humaine, les parachutes sont inutilisables, une propulsion supersonique peut être nécessaire et des systèmes et des architectures d'EDL (entrée, descente et atterrissage) entièrement nouveaux doivent être développés. >>
2. Coefficient balistique
Pour mieux comprendre les difficultés, nous proposons d'introduire le concept de coefficient balistique et de l'expliquer de manière intuitive. Le coefficient balistique β est défini par la formule suivante :
La valeur du coefficient balistique permet de déterminer si le freinage dans l'atmosphère est efficace ou pas. Si la valeur est grande, le freinage n'est pas efficace. Concrètement, cela implique qu'à 20 km d'altitude, la vitesse est encore très importante et il n'y a plus assez de temps pour freiner suffisamment. Théoriquement, le freinage peut être très fort, mais la limite de l'acceptabilité physiologique est de l'ordre de 4G (valeur suggérée par la NASA pour des astronautes professionnels). Et donc, s'il n'y a pas assez de temps pour freiner, un crash sur la surface est inéluctable. Or, précisément, pour une mission habitée, la masse M du vaisseau est bien plus grande que celle d'une mission robotique classique, ce qui a pour conséquence d'augmenter le coefficient balistique. La surface S de freinage d'un gros vaisseau est cependant plus grande que celle d'un petit vaisseau, et comme S est au dénominateur de la formule, cela fait baisser le coefficient balistique. Néanmoins, les mathématiciens le savent, pour une forme et une densité équivalente, si on double la taille d'un vaisseau, son volume et sa masse sont multipliés par 8, alors que sa surface de freinage n'est multipliée que par 4. Le lecteur non mathématicien peut s'en convaincre en s'exerçant au lancement de pierres et de cailloux. Quand on lance un petit caillou de toutes ses forces, la résistance de l'air le freine vite et il ne va pas très loin, alors que si on lance une pierre plus grosse, elle va beaucoup plus loin, car son coefficient balistique est beaucoup plus grand que celui du petit caillou. Ainsi, dans le cas général, plus un vaisseau est grand, plus le coefficient balistique est élevé et plus le freinage atmosphérique est faible.
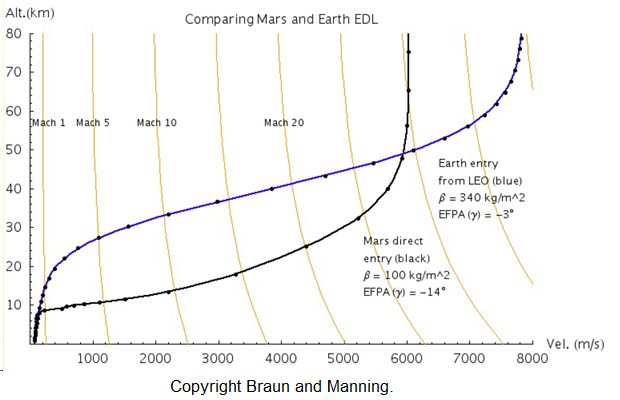
Il est intéressant de comparer le freinage dans l'atmosphère martienne avec le freinage dans l'atmosphère terrestre. La figure ci-dessus est extraite de l'article de Braun et Manning (Braun 2007). En bleu, un vaisseau qui est freiné dans l'atmosphère terrestre voit sa vitesse se réduire fortement jusqu'à Mach 1 (340 m/s) à environ 15 km d'altitude. Pour Mars, même avec un coefficient balistique bien plus faible, le freinage est très tardif et la vitesse de Mach 1 est atteinte à moins de 10 km d'altitude, avec donc très peu de temps pour effectuer un dernier freinage propulsif. De plus, en ce qui concerne Mars, il existe de nombreuses zones largement au-dessus de l'altitude 0, définie de manière arbitraire. Par exemple, le volcan Olympus Mons culmine à 25km d'altitude. Dans ces zones, la marge de manœuvre est encore plus faible, et si c'est vraiment à haute altitude, par exemple 10 km, même les robots n'y sont pas envoyés, ou alors il faudrait trouver un moyen de réduire le coefficient balistique de manière drastique.
Points clés à retenir :
- Le coefficient balistique détermine l'efficacité du freinage atmosphérique.
- Le freinage atmosphérique avec un gros vaisseau est généralement beaucoup moins efficace qu'avec un petit vaisseau.
- Il faut repenser les systèmes d'entrée, descente et atterrissage sur Mars, l'expérience acquise avec les petits vaisseaux étant insuffisante.
3. Quelles solutions ?
3.1 Analyse du problème
L'analyse du problème suggère différentes options. La première est d'allumer les moteurs plus tôt, alors que la vitesse est encore très élevée, on parle de "propulsion supersonique", ce qui amène d'autres difficultés avec la nécessité d'emporter beaucoup plus de carburant. C'est une option envisageable, mais elle n'est certainement pas optimale du point de vue de la masse totale, déjà considérable, qu'il faut faire décoller de la Terre.
Fondamentalement, on l'a vu, c'est le coefficient balistique qui détermine l'efficacité du freinage. Or, il n'existe que trois paramètres sur lesquels on peut jouer pour le réduire. Le premier est la masse du vaisseau, le second la surface de freinage et le troisième est le coefficient de trainée, pour lequel il y a peu de marge. Cependant, si on se donne un peu de liberté au niveau de la forme du vaisseau, il est également possible d'augmenter la portance, par exemple en ajustant l'angle que fait la surface de freinage avec la direction du vaisseau, ou encore en ajoutant des ailes comme pour les avions. Avec une meilleure portance, le coefficient balistique n'est pas nécessairement modifié, mais la vitesse verticale décroit plus rapidement que la vitesse horizontale, ce qui permet de conserver une altitude raisonnable lorsqu'on allume les moteurs pour le freinage final. Ces trois options sont abordées plus en détail dans les sections suivantes.
3.2 Augmenter la surface de freinage
C'est la variable d'ajustement principale si on considère que la charge utile et donc la masse de l'atterrisseur est imposée. Historiquement, pour les petits atterrisseurs robotiques, c'est un bouclier thermique de surface conique de 3 à 5 mètres de diamètre qui était utilisé, comme cela est illustré ci-dessous.
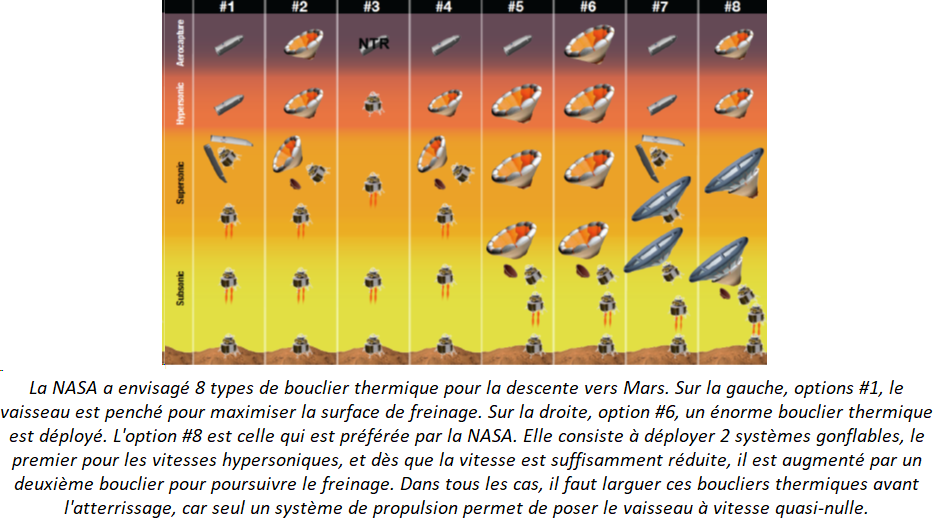
Toutefois, la masse étant fortement augmentée dans le cas d'un voyage habité, il faudrait une largeur de cône de l'ordre de 50 mètres pour obtenir un coefficient balistique égal. Mais une telle largeur est bien entendu incompatible avec le diamètre d'un lanceur. Pour Saturn V, par exemple, le diamètre était de 10 mètres, et il est inconcevable d'envisager des diamètres beaucoup plus grands en raison des contraintes aérodynamiques lors de la phase de montée atmosphérique. Deux options sont alors possibles : la première consiste à embarquer un système gonflable qu'on déploierait avant la rentrée atmosphérique martienne et la deuxième consiste à exploiter un vaisseau relativement long et de le pencher pour que ce soit sa surface longue, couverte d'un bouclier thermique, qui participe au freinage, comme c'était le cas de la navette spatiale américaine. Ces deux concepts sont présentés ci-dessous (NASA DRA 5.0 2009) et (Zang 2010).

L'usage de boucliers gonflables gigantesques n'ayant jamais été testé, on comprend dès lors la circonspection des spécialistes quant à la faisabilité et la maîtrise des risques de la phase de descente dans l'atmosphère martienne. De plus, comme en général il doit y avoir plusieurs vaisseaux qui doivent atterrir dans la même zone, il parait impératif de contrôler la descente avec précision. Or, avec de telles options, le contrôle directionnel semble extrêmement complexe. L'ajout de petites ailettes orientables et de petits moteurs d'orientation pourraient faire l'affaire dans le cas de l'option "cigare allongé" (ou vaisseau Starship), mais dans le cas des boucliers gonflables, cela parait plus difficile. En adaptant la position du centre de masse, ou à l'aide de petits moteurs auxiliaires, il est possible de modifier la trajectoire, mais l'efficacité d'un tel contrôle reste à démontrer. Voir les études complémentaires de Kurzun et al (Kurzun 2010).
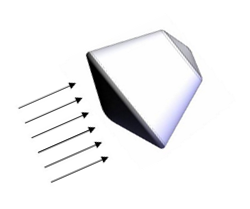
3.3 Augmenter la portance
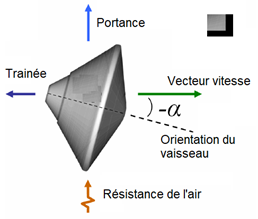
Pour augmenter la portance, on peut agir sur l'orientation du vaisseau. Par exemple, sur le schéma ci-dessus, en ajustant l'angle entre la vitesse et l'orientation du vaisseau, les forces exercées par les surfaces de freinage du bouclier ne sont plus symétriques et la portance est plus importante. La vitesse verticale décroit ainsi plus rapidement que la vitesse horizontale.
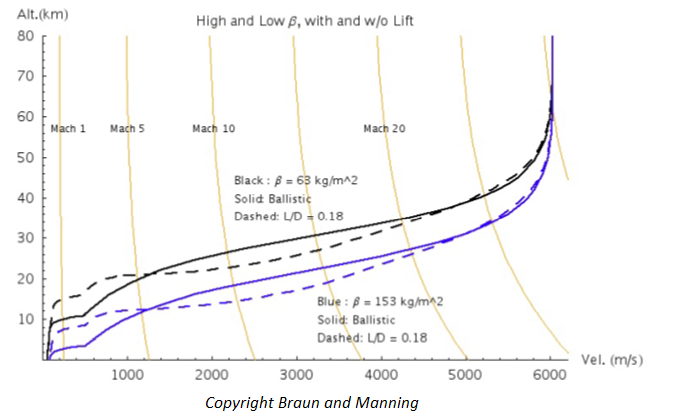
Sur ce schéma issu de l'article de Braun et Manning (Braun 2007), on constate effectivement que sans contrôle de cet angle, un vaisseau avec un coefficient balistique de 153kg/m2 aurait une vitesse encore très élevée à très basse altitude, de l'ordre de 500 m/s à 3km d'altitude (ligne bleue continue), ce qui ne laisse pas assez de temps pour le freinage terminal en mode propulsion. En revanche, en contrôlant cet angle de sorte que le rapport entre la portance et la trainée (noté L/D) soit de 0,18 (ligne bleue discontinue), les 500m/s sont atteints à environ 8 km d'altitude, ce qui laisse assez de temps pour la phase de freinage propulsif. Le contrôle de cet angle n'est cependant pas simple, cela peut se faire en jouant sur la position du centre de masse, en exploitant des petits moteurs auxiliaires, ou à l'aide d'ailettes ajustables. De plus, il faut prendre en compte l'altitude du vaisseau, la trajectoire suivie, celle qui est désirée, la pression extérieure qui peut varier en fonction du vent à haute altitude, etc. A priori, rien d'impossible, mais une grande complexité à maitriser.
3.4 Réduire la masse des atterrisseurs
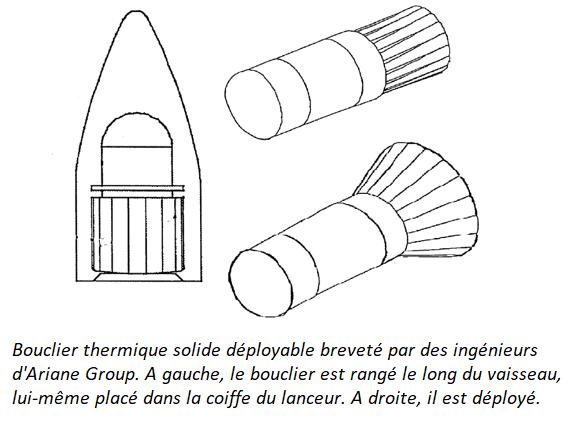
En général, si par exemple on se réfère aux études approfondies de la NASA (DRM3.0 et DRA5.0), la masse du vaisseau n'est pas considérée comme une variable d'ajustement car elle est déterminée par la charge utile à faire atterrir. C'est à notre avis une erreur méthodologique, car il est possible de remplacer un grand vaisseau par plusieurs vaisseaux plus petits. Il est notamment possible de placer certains équipements non essentiels pour la survie dans un autre vaisseau, par exemple les véhicules de surface et les instruments scientifiques. De plus, on peut envisager de diviser l'équipage en deux équipes plus petites. Le concept 2-4-2 proposé en 2011 illustre cette idée (Salotti 2012). L'équipage de 4 astronautes est scindé en 2 équipes de 2 qui descendent à la surface de Mars dans un vaisseau différent et atterrissent proches l'un de l'autre. Selon une autre étude, un équipage de 3 astronautes serait le minimum acceptable et permettrait d'alléger l'atterrisseur de l'ordre de 30 à 40% par rapport à un vaisseau conçu pour 6 astronautes, réduisant ainsi le coefficient balistique de manière significative (Salotti 2016). Ce gain n'est pas anodin, car si on abaisse suffisamment la masse, la surface de freinage peut être fortement réduite, de sorte qu'il redevient possible d'exploiter des boucliers thermiques coniques solides similaires à ceux des missions robotiques. Il faudrait malgré tout un diamètre de 15 à 20 mètres, ce qui est incompatible avec le diamètre des lanceurs. Mais il est envisageable de décomposer le bouclier comme les pétales d'une fleur qui seraient positionnés sur le côté du vaisseau lors du transit vers Mars et de les assembler en temps utile, selon un système de déploiement automatisé, pour reconstituer la forme conique. Voir par exemple la figure ci-après, extraite du brevet déposé par des ingénieurs d'Astrium, aujourd'hui Ariane Group (Trabandt 2010). Cette option présente plusieurs avantages. En premier lieu, il est possible d'exploiter le bouclier une première fois pour l'aérocapture (insertion en orbite en exploitant le freinage atmosphérique), puis pour la descente vers la surface. En second lieu, on peut envisager plusieurs niveaux de déploiement, le premier avec une largeur minimale pour le freinage à vitesse hypersonique, et le deuxième avec une largeur maximale pour ralentir le vaisseau lorsque les vitesses sont seulement supersoniques. Et en troisième lieu, le contrôle du positionnement et orientation des "pétales" permet d'ajuster en temps réel la portance et la trajectoire pour poser le vaisseau avec la plus grande précision. Comparé à un système gonflable, ce système pourrait être plus robuste et plus adaptatif.
Conclusion
Dans le rapport de la DRA 5.0 de la NASA, la conclusion est sans appel : la faisabilité de la manœuvre d'entrée, descente et atterrissage sur Mars n'est pas démontrée à l'heure actuelle ! Le coefficient balistique, en particulier, est généralement bien plus grand pour les vaisseaux géants que pour les petits vaisseaux, ce qui a pour conséquence de rendre moins efficace le freinage atmosphérique. Des solutions existent, fort heureusement. La première est basée sur le déploiement de boucliers gonflables géants, la deuxième exploite la surface allongée du vaisseau pour renforcer la portance et la troisième consiste à réduire la taille du vaisseau, avec comme conséquence de réduire également la taille de l'équipage, quitte à multiplier les atterrisseurs. Attention, nous n'avons pas abordé dans ce résumé synthétique les problématiques de la phase propulsive menant à l'atterrissage, des transitions (éjection du bouclier par exemple), du contrôle thermique (la chaleur du bouclier ne doit pas être transmise au module habité !), du guidage et de la navigation, de l'intégration éventuelle de systèmes de secours, et des facteurs humains comme la capacité à résister aux fortes accélérations. Certains éléments, comme l'atterrissage terminal, sont toutefois développés dans d'autres rubriques du Wiki.
Références
(Braun 2007) R.D. Braun and R.M. Manning: Mars Exploration Entry, Descent and Landing Challenges. Journal of Spacecraft and Rockets, vol. 44 (2), March-April 2007.
(NASA DRA 5.0 2009) G. Drake (Ed.), Mars Architecture Steering Group, 1st Addendum of the Human Exploration of Mars, Design Reference Architecture 5.0, NASA Johnson Space Center, 2009.
(Kurzun 2010) A.M. Kurzun, G. F. Dubos, C.K. Iwata, B.A. Stahl, A concept for the entry, descent, and landing of high-mass payloads at Mars, Acta Astronautica, vol. 66, p. 1146-1159, 2010.
(Salotti 2012) J.M. Salotti, Revised Scenario for Human Missions to Mars, Acta Astronautica, vol. 81, p. 273-287, 2012.
(Salotti 2016) J.M. Salotti, Robust, affordable, semi-direct Mars mission, Acta Astronautica, Volume 127, October–November 2016, pages 235–248, 2016.
(Trabandt 2010) U. Trabandt et Manfred Schmid, Deployable heat shield and deceleration structure for spacecraft, brevet US 7,837,154 B2, 2010. (Zang 2010) T. Zang, A. D. Cianciolo, D. Kinney, A. Howard, G. Chen, M. Ivanov, R. Sostaric and C. Westhelle, Overview of the NASA Entry, Descent and Landing Systems Analysis Study, proceedings of the AIAA Space Conference, Anaheim, California, 2010, https://doi.org/10.2514/6.2010-8649

... Envie de lire la suite ?
Cet article est disponible dans sa version complète pour les membres APM avec une cotisation à jour.
Déjà membre ? Me connecter. Sinon, devenez membre aujourd'hui et ne ratez aucune info sur Mars !
Si vous avez déjà été membre, rendez-vous sur la page Mon Compte pour renouveler votre cotisation.