

Nous avions laissé Ingenuity après son vol 4, de 266 m le 30 avril, au cours duquel il avait atteint la vitesse record de presque 13km/h. Ceci augurait d’un vol 5 plein d’espoirs de réussites avec ses nouvelles perspectives d’élargissement de son domaine de vol, et ses nouvelles missions « d’éclaireur » de Perseverance que la Nasa avait décidées pour analyser ce que pourrait être l’aide apportée ainsi par des drones en prolongeant la mission de 30 jours.
Le vol 5 a eu lieu le 7 mai sans aucune difficulté en direction du nouvel aérodrome, le « terrain des Frères Wright » à quelques 129 m au sud de son premier terrain d’essais.
Le record d’altitude a été battu en s’élevant à 10 m. le vol avait duré 108 secondes.
Le vol 6 a eu lieu le 22 mai.
La mission était de réaliser une reconnaissance aérienne et de se poser en terrain non repéré à l’avance. S’élevant à 10 m d’altitude le drone-hélicoptère devait se poser dans une nouvelle zone à l’instar du vol 5 et ne serait pas filmé par Perseverance dont la mission reste prioritaire, en particulier l’exploration géologique qui doit commencer sous peu.
Un incident sans gravité mais avec un posé délicat, s’est produit lors des 29 dernières secondes du vol dont le chef pilote Havard Grip du JPL a expliqué le 27 mai les raisons techniques, dans un long message :
Nous vous en donnons la traduction ci dessous.
« « «
Lors du sol 91 de la misssion Perseverance, Ingenuity a effectué son sixième vol.
Le vol a été conçu pour élargir le domaine de vol et démontrer les capacités d’imagerie aérienne en prenant une image stéréo d’une région d’intérêt à l’ouest. Ingenuity a reçu l’ordre de monter à une altitude de 10 mètres avant de voler 150 mètres vers le sud-ouest à une vitesse sol de 4 m/seconde. À ce moment-là, il devait voler 15 mètres vers le sud tout en prenant des images vers l’ouest, puis voler encore 50 mètres au nord-est et atterrir.
La télémétrie du sixième vol montre que la première étape de 150 mètres du vol s’est déroulée sans accroc. Mais vers la fin de cette étape, quelque chose s’est produit : Ingenuity a commencé à ajuster sa vitesse et à s’incliner d’avant en arrière selon un schéma oscillant. Ce comportement a persisté pendant le reste du vol. Avant d’atterrir en toute sécurité, les capteurs embarqués ont indiqué que le drone hélicoptère avait rencontré des écarts de roulis et de tangage de plus de 20 degrés, de grandes entrées de commande et des pics de consommation d’énergie.
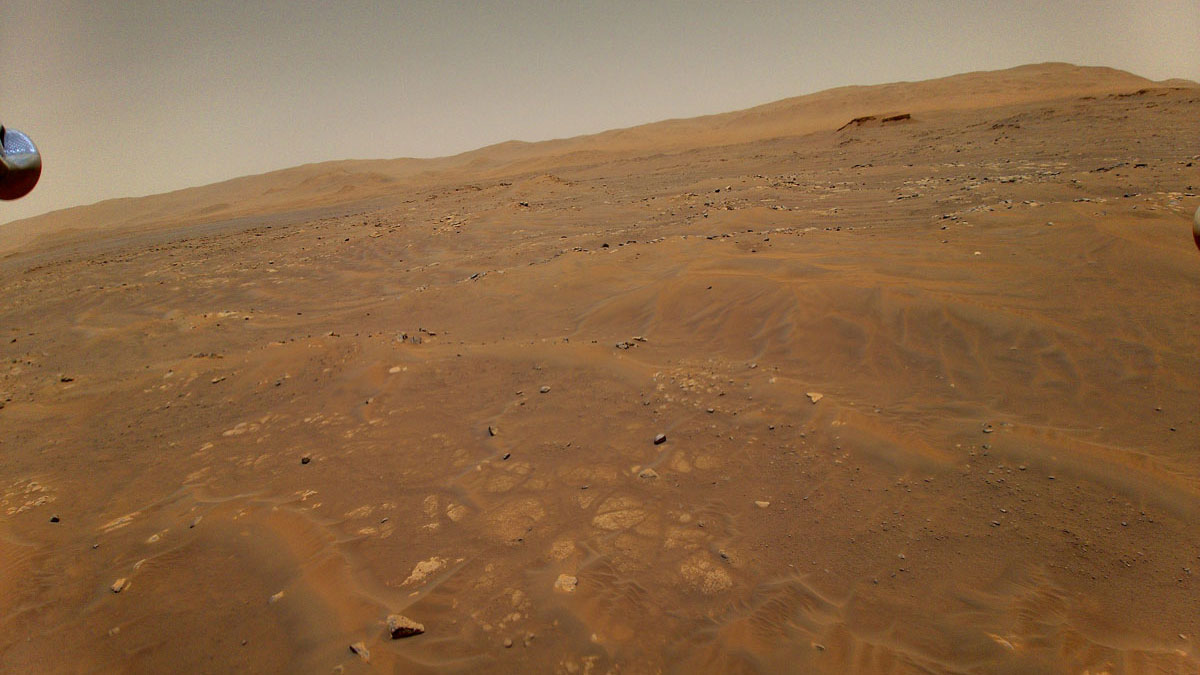
Cette séquence d’images – prise le 22 mars 2021 par la caméra de navigation à bord de l’hélicoptère Mars Ingenuity de la NASA – représente les 29 dernières secondes du sixième vol du giravion. Crédits: NASA / JPL-Caltech. Vidéo>
Comment Ingenuity estime le mouvement
En vol, Ingenuity suit son mouvement à l’aide d’une unité de mesure inertielle embarquée (IMU). L’IMU mesure les taux d’accélération et de rotation d’Ingenuity. En intégrant ces informations dans le temps, il est possible d’estimer la position, la vitesse et l’attitude du drone-hélicoptère (où il se trouve, à quelle vitesse il se déplace et comment il est orienté dans l’espace). Le système de contrôle embarqué réagit aux mouvements estimés en ajustant rapidement les entrées de contrôle (à un rythme de 500 fois par seconde). Si le système de navigation reposait uniquement sur l’IMU, il ne serait pas très précis à long terme, les erreurs s’accumuleraient rapidement et l’hélicoptère finirait par se perdre.
Pour maintenir une meilleure précision dans le temps, les estimations basées sur l’IMU sont normalement corrigées régulièrement, et c’est là qu’intervient le système de navigation d’Ingenuity. La plupart du temps en vol, les caméras tournées vers le bas prennent 30 photos par seconde de la surface martienne et les alimentent immédiatement dans le système de navigation du drone-hélicoptère. Chaque fois qu’une image arrive, l’algorithme du système de navigation effectue une série d’actions : tout d’abord, il examine l’horodatage qu’il reçoit avec l’image afin de déterminer quand celle-ci a été prise.
Ensuite, l’algorithme fait une prédiction sur ce que la caméra aurait dû voir à ce moment particulier, en termes de caractéristiques de surface qu’il peut reconnaître à partir d’images précédentes prises quelques instants auparavant (généralement en raison de variations de couleur et de protubérances comme des roches et des ondulations de sable. ). Enfin, l’algorithme examine où ces caractéristiques apparaissent réellement dans l’image. L’algorithme de navigation utilise la différence entre les emplacements prévus et réels de ces entités pour corriger ses estimations de position, de vitesse et d’attitude.
d’altitude lors du vol 6 Crédit NASA/JPL
Anomalie du vol six
Environ 54 secondes après le début du vol, un problème s’est produit dans le pipeline d’images fournies par la caméra de navigation. Ce problème a entraîné la perte d’une seule image, mais plus important encore, toutes les images de navigation ultérieures ont été livrées avec un horodatage inexact. A partir de ce moment, chaque fois que l’algorithme de navigation effectuait une correction sur la base d’une image de navigation, il fonctionnait sur la base d’informations incorrectes sur le moment où l’image était prise.
Les incohérences qui en résultent ont considérablement dégradé les informations utilisées pour piloter le drone-hélicoptère, conduisant à des estimations constamment «corrigées» pour tenir compte des erreurs fantômes. De grandes oscillations s’ensuivirent.
Survivre à l’anomalie
Malgré cette anomalie, Ingenuity a pu maintenir le vol et atterrir en toute sécurité à la surface à environ 5 mètres du lieu d’atterrissage prévu. Une des raisons pour lesquelles il a pu le faire est l’effort considérable qui a été déployé pour garantir que le système de commande de vol du drone-hélicoptère dispose d’une grande «marge de stabilité». Nous avons conçu Ingenuity pour supporter sans devenir instable des erreurs importantes, y compris des erreurs de chronométrage. Cette marge intégrée n’était pas entièrement nécessaire pour les vols précédents d’Ingenuity, car le comportement du drone-hélicoptère était en accord avec nos attentes, mais cette marge est venue à la rescousse dans le vol six.
Une autre décision de conception a également joué un rôle en aidant Ingenuity à atterrir en toute sécurité. Nous arrêtons d’utiliser les images des caméras de navigation pendant la phase finale de la descente à l’atterrissage pour garantir des estimations de mouvement fluides et continues de l’hélicoptère pendant cette phase critique. Cette décision de conception a également porté ses fruits pendant le vol six : Ingenuity a ignoré les images de la caméra dans les derniers instants du vol, a cessé d’osciller, a nivelé son attitude et a atterri à la vitesse prévue.
En regardant la situation dans son ensemble, le vol 6 s’est terminé avec Ingenuity en toute sécurité au sol, car un certain nombre de sous-systèmes – le système de rotor, les actionneurs et le système d’alimentation – ont répondu à la demande accrue de maintien du drone-hélicoptère en vol.
Dans un sens très réel, Ingenuity s’est conforté à travers cette situation, et si le vol chronométré a révélé une vulnérabilité qui devra maintenant être corrigée, il a également confirmé la robustesse du système de multiples façons.
Bien que nous n’ayons pas intentionnellement planifié un vol aussi stressant, la NASA dispose désormais de données de vol sondant les limites extérieures de l’enveloppe de vol/performance du drone-hélicoptère.
Ces données seront soigneusement analysées dans le temps à venir, élargissant notre réservoir de connaissances sur le vol de drones-hélicoptères sur Mars.
« « « «

Cette image d’Ingenuity a été prise le 23 juillet 2021 – au lendemain de son sixième vol – par l’instrument Mastcam-Z à bord du Perseverance Mars Rover. Crédits: NASA / JPL-Caltech / ASU / MSSS