

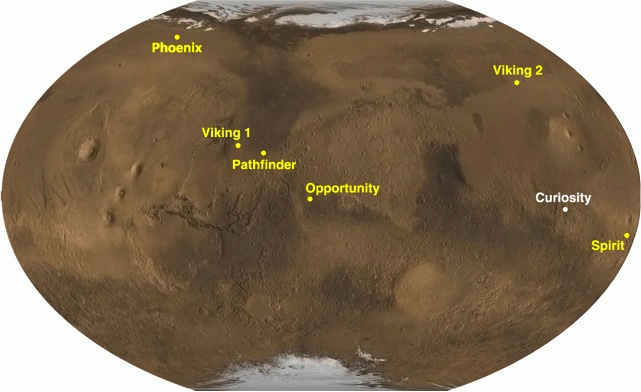
Pour mémoire la position des différents sondes qui se sont posées avec succès sur Mars, dont Curiosity dans le cratère Gale (doc. NASA/JPL-Caltech)
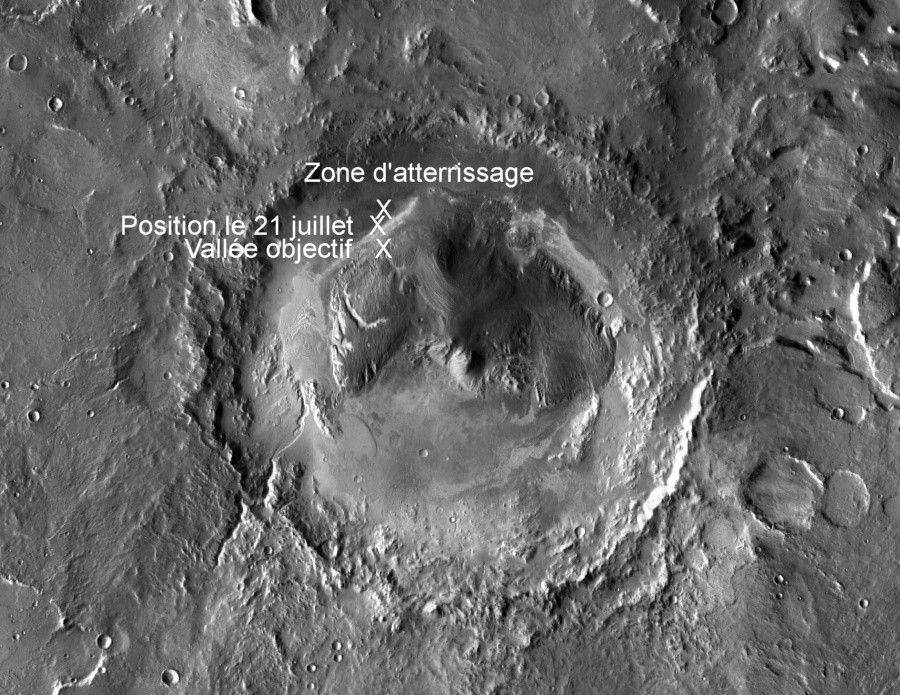
Le point d’atterrissage de Curiosity, sa position au 21 juillet et celle du débouché de la vallée qu’il vise d’atteindre, resitués dans le contexte d’ensemble du cratère Gale de 155 km de diamètre, agé de 3,7 milliards d’années. Image de la caméra infrarouge Themis de Mars Odyssey (doc. NASA/JPL-Caltech/ASU)
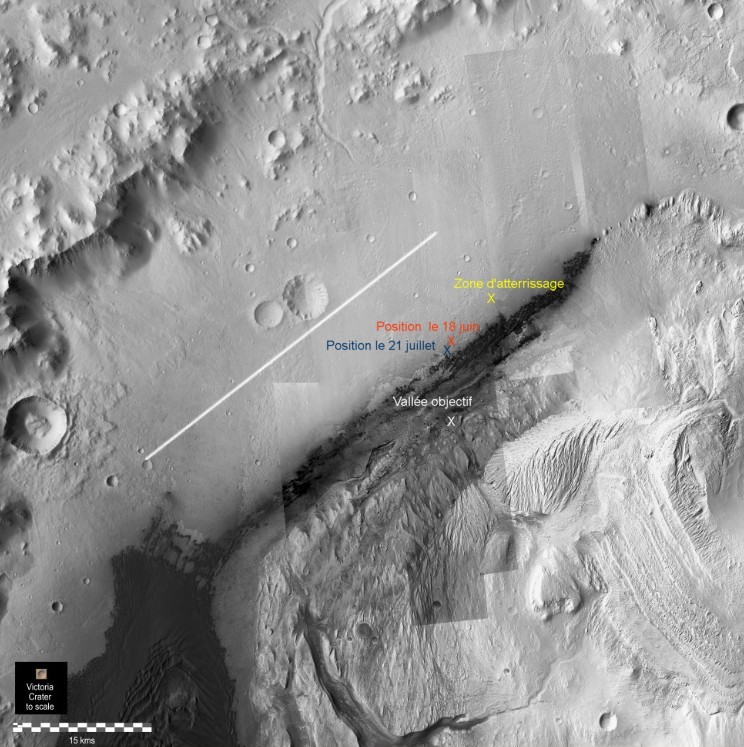
Une vue plus rapprochée du Nord Ouest du cratère Gale avec la position du point d’atterrissage du Curiosity et ses positions le 18 juin et le 21 juillet, comparées au débouché de la vallée à atteindre. Le trait blanc indique, à titre de comparaison, la distance de 40 km parcourue à ce jour par l’autre rover en opération sur Mars, Opportunity, qui vient de battre le record détenu par le Lunakhod russe sur la Lune. Image de la caméra HiRISE de Mars Reconnaissance Orbiter. (Doc. NASA/JPL-Caltech/Univ. of Arizona)

Toute la zone à parcourir entre la position au 21 juillet et l’éventail alluvionnaire de la vallée qui descend du Mont Sharp. La zone est assez accidentée et présente de grandes dunes (noires). (Doc. NASA/JPL-Caltech/University of Arizona)
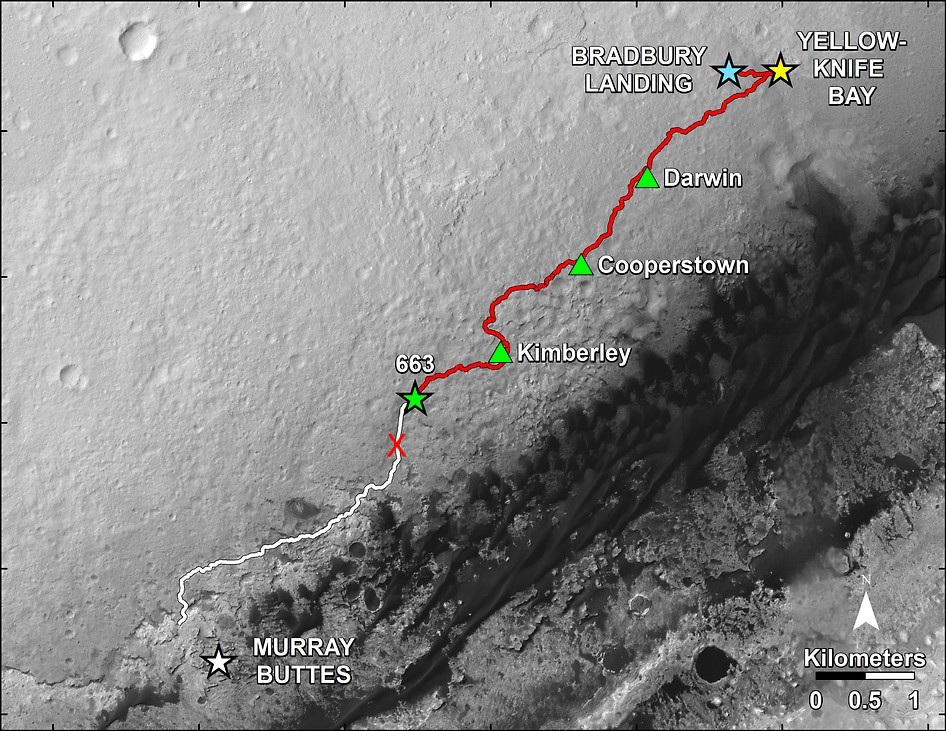
Le trajet effectué par Curiosity et ses dernières positions le 27 juin puis le 21 juillet (croix rouges), au sol 696 soit le 696ème jour martien d’opérations. Murray Buttes marque le point d’entrée dans la zone accidentée qui conduit vers l’éventail alluvionnaire. (Doc. NASA/JPL-Caltech/Univ. of Arizona/USGS)
 Une image plus rapprochée du terrain avec la position du 21 juillet (doc. NASA/JPL-Caltech)
Une image plus rapprochée du terrain avec la position du 21 juillet (doc. NASA/JPL-Caltech)
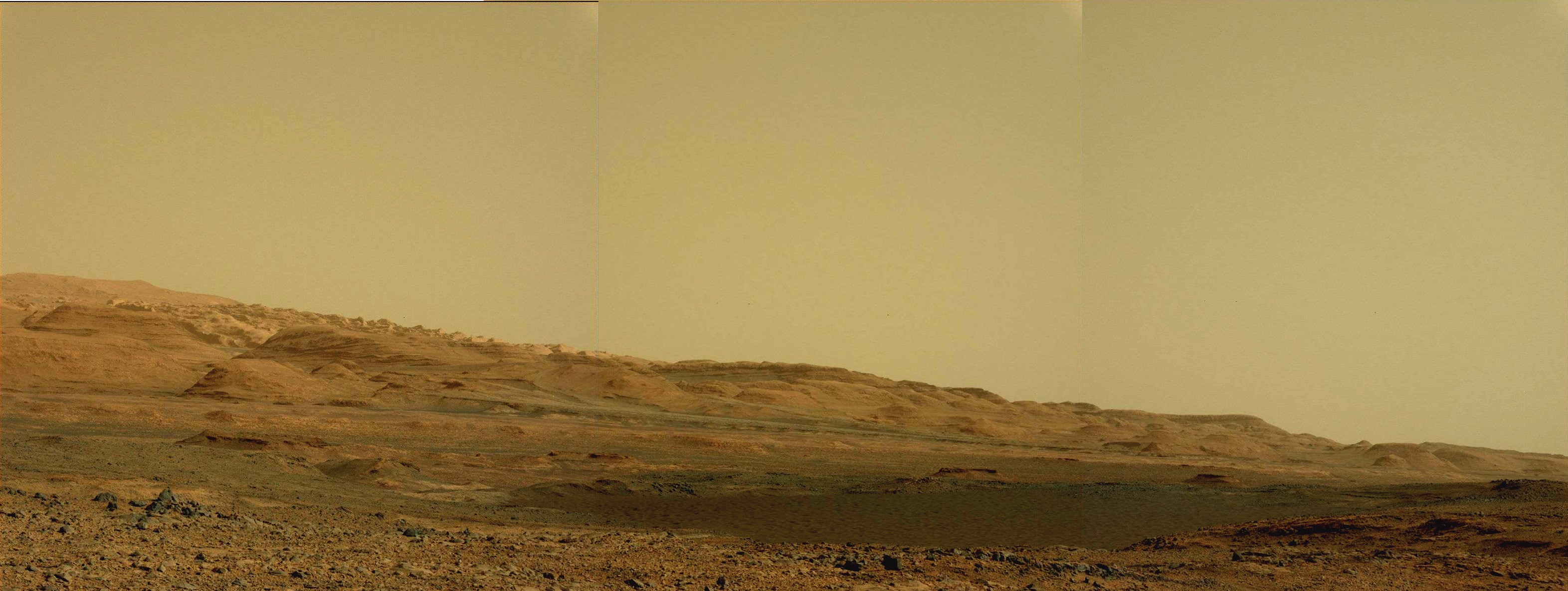
Une vue de l’éventail alluvionnaire (fine bande grise dans la zone centrale) et le débouché de la vallée (à gauche). Montage de trois images Navcam du 22 juillet. (Doc. NASA/JPL-Caltech)
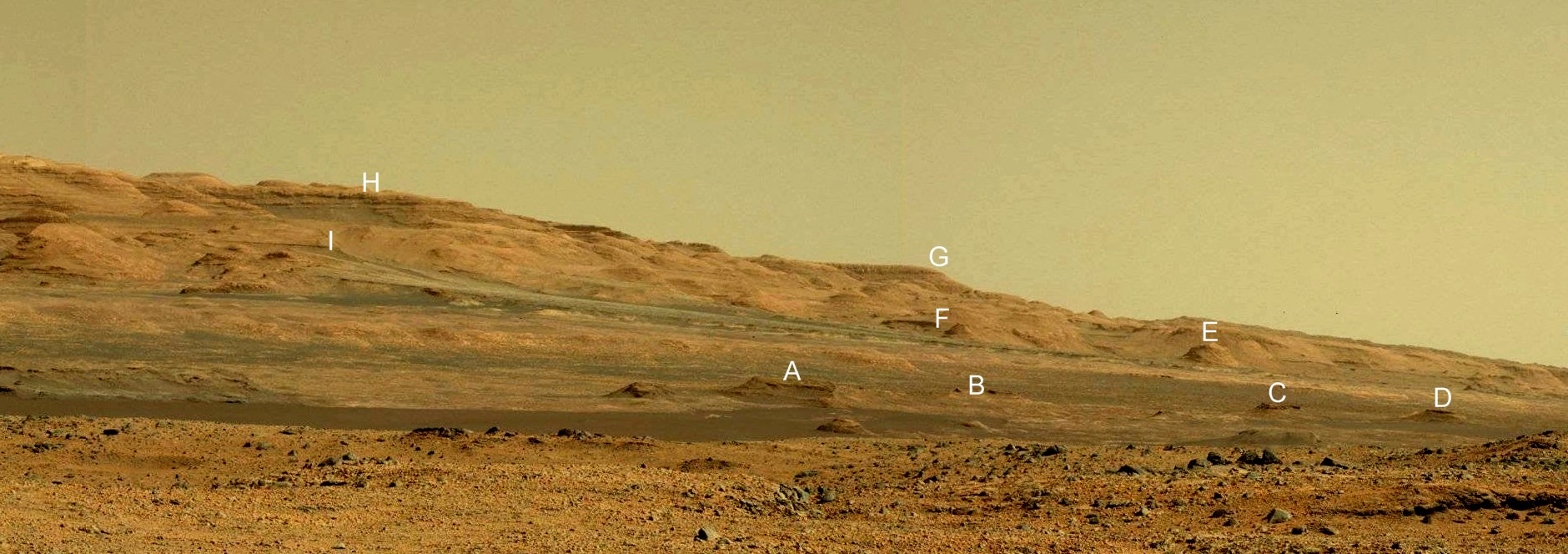
Par comparaison à cette image du 6 juin, la vallée ne semble pas beaucoup plus proche le 22 juillet, mais le repérage d’un certain nombre de points caractéristiques à moyenne distance et plus éloignés montre que le rover s’est nettement déplacé vers la droite. Voir la vue suivante présentant les mêmes repères sur l’image du 22 juillet. (Doc. NASA/JPL-Caltech)

Les mêmes points repères sur l’image du 22 juillet montrant le glissement vers la gauche des points situés à moyenne distance par rapport à ceux situés au loin (doc. NASA/JPL-Caltech)
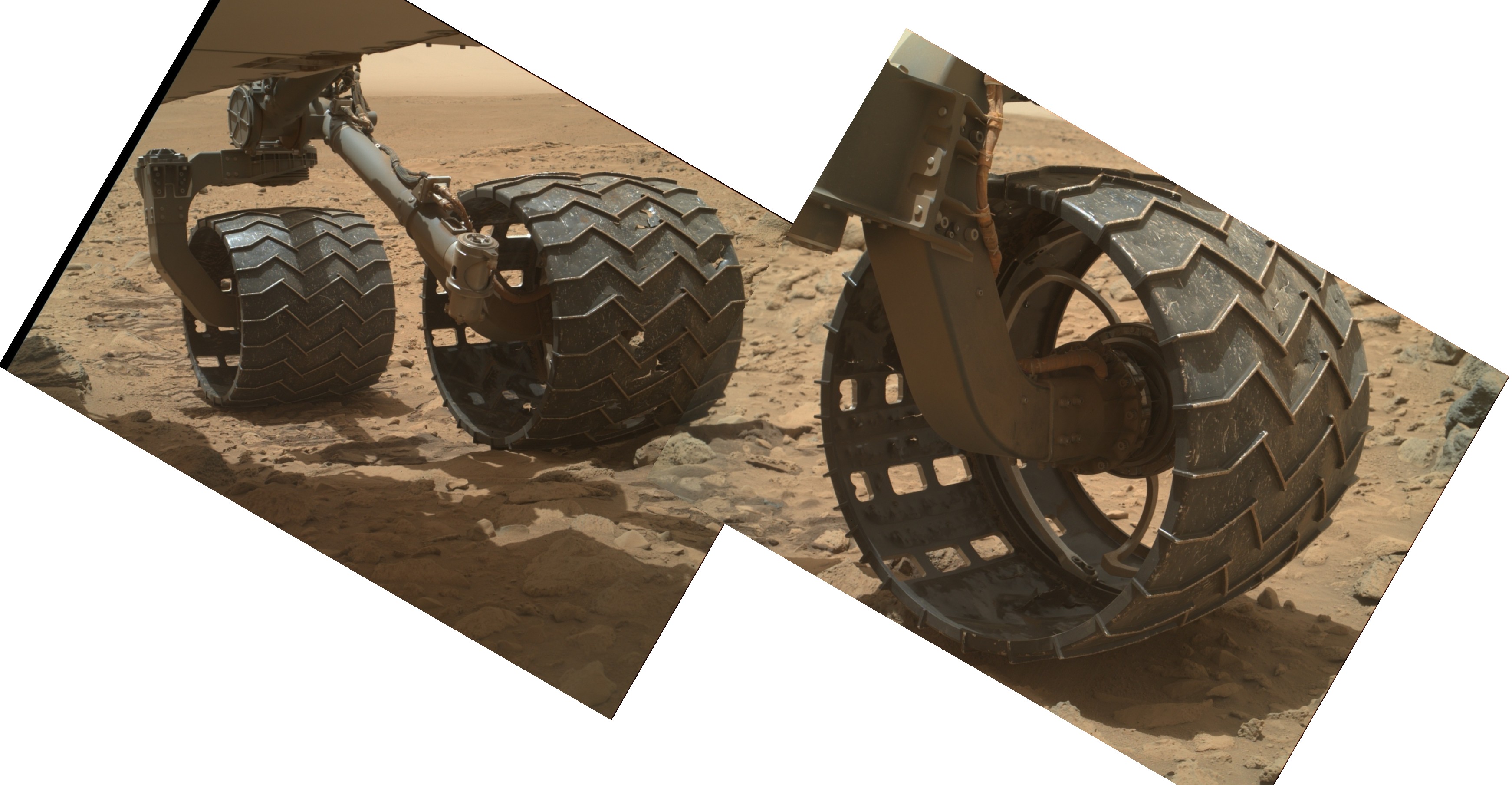
L’état de dégradations des roues semble stable pour autant que l’on puisse en juger sur ces images de la caméra MAHLI prises le 20 juillet (doc. NASA/JPL-Caltech/MSSS)

Le train de roues de l’autre coté vu également par la caméra MAHLI le 20 juillet. Située au bout du bras, cette caméra peut ainsi être descendue sous la base du rover pour observer les roues. (Doc. NASA/JPL-Caltech/MSSS)