Le 3 juin le DLR publiait un intéressant article sur son blog qui expliquait en détail la procédure délicate utilisée depuis le dernier post du 21 février, ainsi que les tests réalisés une fois par semaine « martienne » compte tenu de la disponibilité des effectifs qui vaquent aussi à d’autres projets. La situation est loin d’être aisée à résoudre. Il va falloir être patient et persévérant. C’est la nature et la texture du sol rencontré qui a perturbé les opérations d’enfouissement de la taupe. Il a été démontré que ce n’est pas une pierre qui a fait obstacle.
Voici la traduction de ce post récent.
« « « « «
En raison du manque de succès lors de la dernière tentative d’épinglage, l’équipe a décidé d’adopter une stratégie alternative et d’essayer la technique de «back-cap push» à la place. Pour cela, la cuillère/écope est placée au-dessus du capuchon arrière de la taupe et lentement abaissée jusqu’à ce qu’elle touche le capuchon. Le bras est ensuite encore abaissé et tendu de telle sorte que la cuillère appuie sur la taupe avec une force d’environ 50 newtons. Lorsque la taupe descend dans la surface, l’écope suit son mouvement vers le bas, mais la charge diminue à mesure que la taupe progresse. Après environ 1,5 cm, la force de poussée est réduite à zéro et l’action de poussée doit donc être renouvelée.
En raison de l’orientation de la taupe dans la fosse et de la portée limitée du bras, l’écope touche le capuchon arrière près de son bord en plus ou moins un seul point.
L’image ci-dessous montre la situation telle que simulée dans un laboratoire du DLR. Cette simulation a été effectuée pour évaluer à quel point le placement était critique pour l’attache.
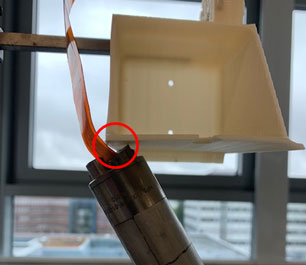
Comme on peut le voir, une erreur de placement de quelques millimètres seulement aurait pu faire glisser l’écope du capuchon arrière ou endommager l’attache. De plus, au fur et à mesure que la taupe descend, le godet se déplace vers la gauche par rapport à la taupe et vers la longe de câbles.
Par conséquent, l’équipe a procédé avec beaucoup de prudence. Après chaque déplacement, la situation a été vérifiée par imagerie et enregistrements des données de courant du moteur du bras avant qu’un certain nombre de coups de marteau ne soient commandés. Nous avons commencé la procédure avec seulement quelques (25) coups de marteau. Ce n’est qu’après que l’équipe ait acquis une certaine confiance dans sa capacité à placer soigneusement l’écope dans le rythme de progression de la taupe que nous avons augmenté le nombre de coups de marteau par session pour, finalement, 150 coups par session.
Comme je l’avais signalé dans un précédent billet, le mode de fonctionnement actuel de la mission InSight ne permet qu’un seul cycle d’opérations par semaine. (Rappelez-vous, nous sommes dans une phase de la mission où les instruments devraient être « en surveillance » plutôt que « en déploiement ». Dans la phase de déploiement au début de 2019, le management était axé sur le succès – c’est-à-dire, au besoin. Dans la phase de surveillance, nous avons beaucoup moins de membres de l’équipe ; la plupart ont d’autres engagements de projet.) Ainsi, le placement de l’écope n’a eu lieu qu’une semaine sur deux (principalement le samedi), suivi par ce que les ingénieurs spatiaux appellent un « sol dans la boucle », c’est-à-dire un vérification du placement de l’écope les lundis pour donner le feu vert pour le prochain martelage, généralement le samedi suivant.
Nous avons commencé à environ sept centimètres au-dessus de la surface au Sol 458 (11 mars) et nous sommes maintenant à la surface avec la pelle au Sol 536 (30 mai), après six cycles de martelage sur 11 semaines.
Le film ci-dessous montre toute l’histoire de la pénétration par poussée arrière.

Il est possible que le martelage se soit arrêté lorsque le bord gauche de la pelle était encore à environ un millimètre au-dessus de la surface. De plus, la cuillère est évidemment à un angle par rapport à la surface du régolithe, de sorte que le bord droit de l’écope peut toujours être à environ un centimètre au-dessus de la surface. De plus, nous savons que la surface est recouverte d’environ un centimètre de sable relativement meuble que l’écope peut comprimer.
Par conséquent, la prochaine étape sera un autre martèlement avec l’écope poussant sur le capuchon arrière. Pendant ce martelage, nous nous attendons à ce que le godet soit arrêté par le régolithe (s’il n’a pas déjà été arrêté à la fin du martelage Sol 536) et nous pouvons voir si la taupe est capable de creuser par elle-même. Nous appelons cela le test de la « taupe libre ».
De toute évidence, la taupe n’a pas été arrêtée par une pierre comme cela avait été suggéré.
Vous vous souvenez peut-être que notre principale théorie était que la taupe ne se déplaçait pas dans le sous-sol parce que le régolite ne fournissait pas suffisamment de friction pour équilibrer la force de recul de la taupe. Bien que cette force soit beaucoup plus petite que la force qui fait avancer la taupe (cinq à sept newtons contre 900 newtons), elle doit encore être fournie par la pression du terrain autour. Les calculs dont j’avais discuté plus tôt dans ce blog suggèrent que la force de friction suffira si la taupe est complètement enterrée. Un frottement supplémentaire peut être fourni si nous utilisons le bras pour charger la surface, ce que nous ferons.
Si la taupe se déplace d’elle-même dans le sous-sol (bien qu’elle soit quelque peu aidée par la poussée du régolite), le frottement augmentera et améliorera la situation à mesure que la taupe se déplacera plus profondément. Lorsque le capuchon arrière de la taupe sera à une profondeur d’environ 20 centimètres, la charge de la surface sera devenue inefficace et la poussée du régolithe ne devrait plus être nécessaire. Nous ferons alors ce que nous avions prévu de faire il y a plus d’un an : ordonner à la taupe de marteler en profondeur.
Donc, vous voyez, la prochaine étape, le test libre de la taupe, sera très excitante. Mais que se passe-t-il si la taupe n’est tout simplement pas assez profonde pour une friction suffisante ? Nous avons alors deux options, soit remplir la fosse pour fournir plus de frottement et pousser sur le régolithe, soit utiliser la pelle pour pousser à nouveau sur le capuchon arrière, mais cette fois avec sa pointe plutôt qu’avec sa surface inférieure plate. Ce serait une opération un peu plus difficile mais réalisable, comme le pense l’équipe du bras, Instrument Deployment Arm (IDA).
De plus, l’hiver approche dans l’hémisphère nord de Mars et la saison des tempêtes de poussière va bientôt commencer. L’atmosphère devient déjà plus poussiéreuse et la puissance générée par les panneaux solaires diminue. Cela peut affecter notre capacité à effectuer des opérations énergivores avec le bras dans un avenir proche. Restez à l’écoute et croisez les doigts.
Et, n’est-ce pas merveilleux de voir comment les gens peuvent travailler ensemble de chez eux sur de grandes distances sur Terre et vers Mars ? Merci beaucoup à l’équipe !
Tilman Spohn Leader instrument HP3
» » » » » »
Avec le lien ci-dessous vous pourrez voir l’animation et le texte original.
https://www.dlr.de/blogs/en/all-blog-posts/The-InSight-mission-logbook.aspx
Superbe article, précis et immersif. Merci!
Bonjour à tous
Article toujours très intéressants à lire sans connaître le système de propulsion Mécanique interne de la taupe. Cela démontre au moins la capacité de l’homme à trouver des astuces pour résoudre des situations imprévues qui n’ont pas été prévues initialement par la robotique embarquée. Pour le voyage sur Mars il faudra prévoir des scénarios incidentels pour tester déjà à terre la réaction des astronautes. Ceci étant dit j’ai enfin compris la raison qui entraîne autant de difficulté pour atterrir sur Mars sans perte de la capsule.?En effet en examinant les conditions d’alunissage je ne comprenais pourquoi sur Mars on redoutait la phase de ralentissement par frottement, puis des parachutes et enfin des rétrofusées. Il s’agit d’un problème de gravité plus élevée si Mars que sur la lune. On peut ainsi imaginer ces conditions d’atterrissage sur Mars pour toutes les capsules de transports de matériels et équipements. En ce qui concerne l’arrivée de l’homme sur Mars et même si cela demande une quantité de carburant importante je serai plus rassurée par un processus de rétrofusées piloté en automatique mais aussi potentiellement en Manuel si besoin pour mieux cibler le point d’impact de la capsule. Il faudra mettre en orbite des réservoirs à carburant O2 et H2 pour permettre au module de descente de disposer du carburant nécessaire pour effectuer sa phase de ralentissement après avoir été placé en orbite basse. Bon je ne suis qu’un béotien dans les calculs de déplacements spatiaux je suppose que tous les scénarios ont été étudiés pour minimiser le risque car la phase d’atterrissage sur Mars est de mon point de vue la plus critique. Je peux recevoir une réponse en anglais.