

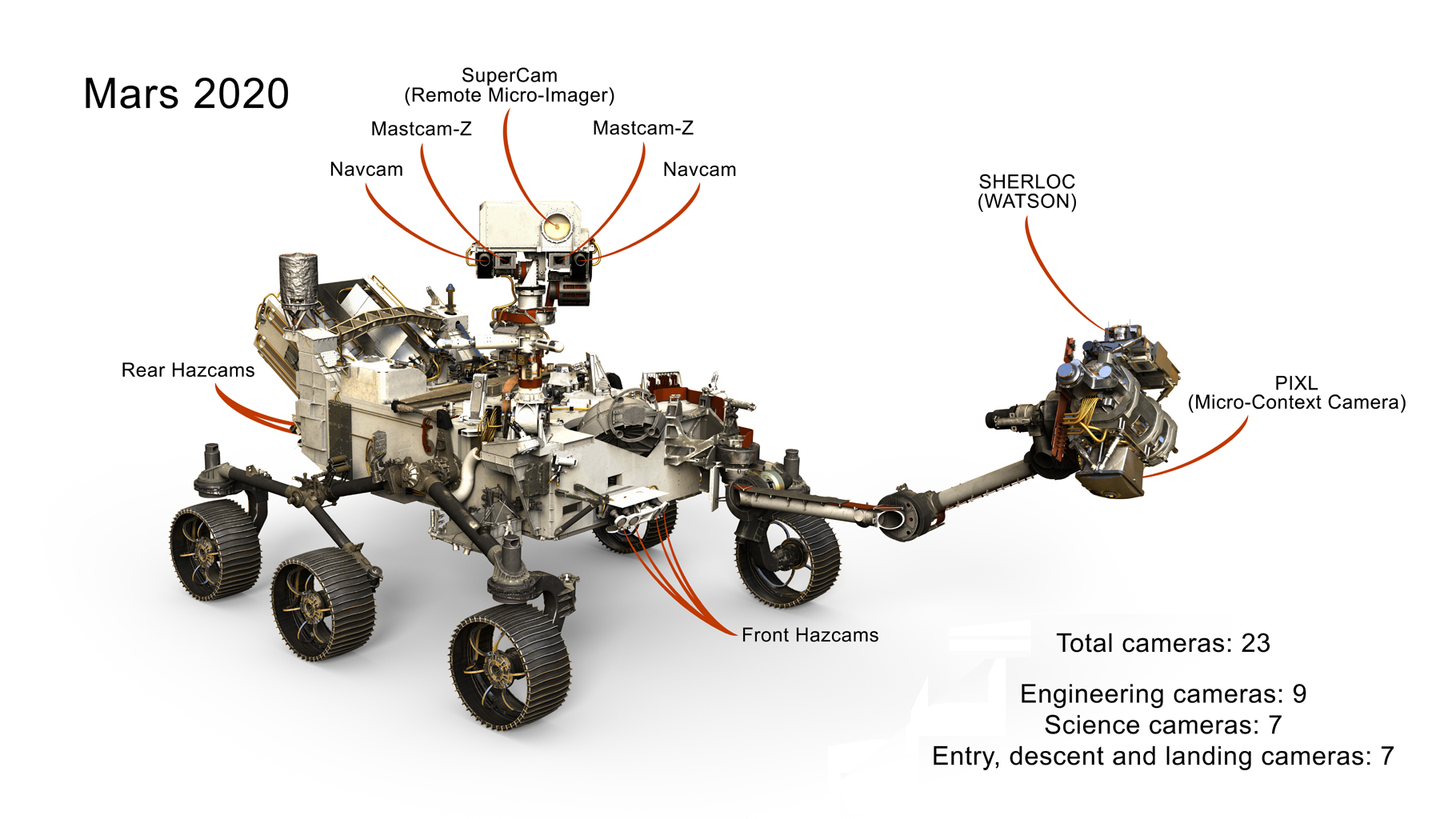
La NASA vient de publier des infos sur les caméras qui équiperont le frère de Curiosity qui sera lancé en 2020. Elles seront au nombre de 23. (Doc. NASA/JPL-Caltech)
Les différentes caméras sont décrites (anglais) sur le site dédié à la mission Mars 2020.
Il y aura par exemple pas moins de 7 caméras consacrées à la phase descente : plusieurs regardant l’ouverture du parachute, une à bord du module de freinage final regardant la descente sous câbles du rover, une à bord du rover regardant vers le haut le fonctionnement du module de descente, une (comme sur Curiosity) regardant vers le sol.
La caméra regardant vers le haut à l’ouverture du parachute devrait fournir des images analogues à celle obtenus lors d’un essai de rentrée atmosphérique terrestre effectué le 4 octobre. Après un envol depuis Wallops Island dans une fusée Black Brant IX jusqu’à 58 km, le parachute a été ouvert à 42 km à 1,8 fois la vitesse du son. Les essais de déploiement pour Curiosity n’avaient été conduits qu’en soufflerie.
voir vidéo de l’essai:
https://youtu.be/mTAbj8aRVvg?list=PLTiv_XWHnOZpzQKYC6nLf6M9AuBbng_O8
Il y aura aussi des « engineering » caméras destinées à la conduite du rover capables de prendre des vues pendant que le véhicule roule.
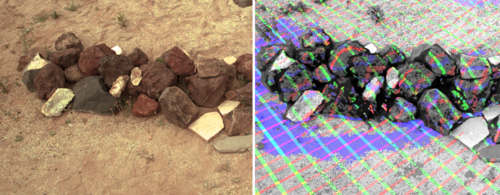
L’image des « engineering » caméras peut être analysée à bord pour définir le relief des obstacles, comme le montrent ces images prises à 15 m de distance dans le Mars Yard du JPL (doc. NASA/JPL-Caltech)
Il y aura aussi six Hazcam, 4 devant et 2 derrière. Les caméras permettront des vues 3D donnant au rover la capacité à choisir son chemin sans consultation du sol.
Comme sur Curiosity, il y aura deux Navcams mais en couleur qui participeront également à la conduite autonome du rover.
Une caméra sera spécialement destinée à observer les échantillons de roches collectées afin d’être renvoyées sur Terre lors d’une mission ultérieure.

Exemple de vue prise par la CacheCam (doc. NASA/JPL-Caltech)

Pour un retour d’échantillons sur Terre … un jour (doc. NASA/JPL-Caltech)
Enfin il y aura 7 caméras scientifiques :
-Mastcam-z (en fait deux caméras pour vues stéréos)
-SuperCam (la ChemCam améliorée)
-PIXL (comportant un imageur et un analyseur à rayons X)
-Sherloc (spectromètre+laser+macro caméra)
-Watson (une version améliorée de Mahli)
PIXL, Sherloc et Watson sont situés au bout du bras robotique.
Le rover sera aussi équipé d’un microphone.